

Mechanical foot for multi-foot robot
A multi-legged robot and mechanical foot technology, applied in the field of mechanical feet, can solve the problems of reducing the working space of the manipulator and increasing the weight of the robot, and achieve the effects of simple structure, light weight and simple control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings.
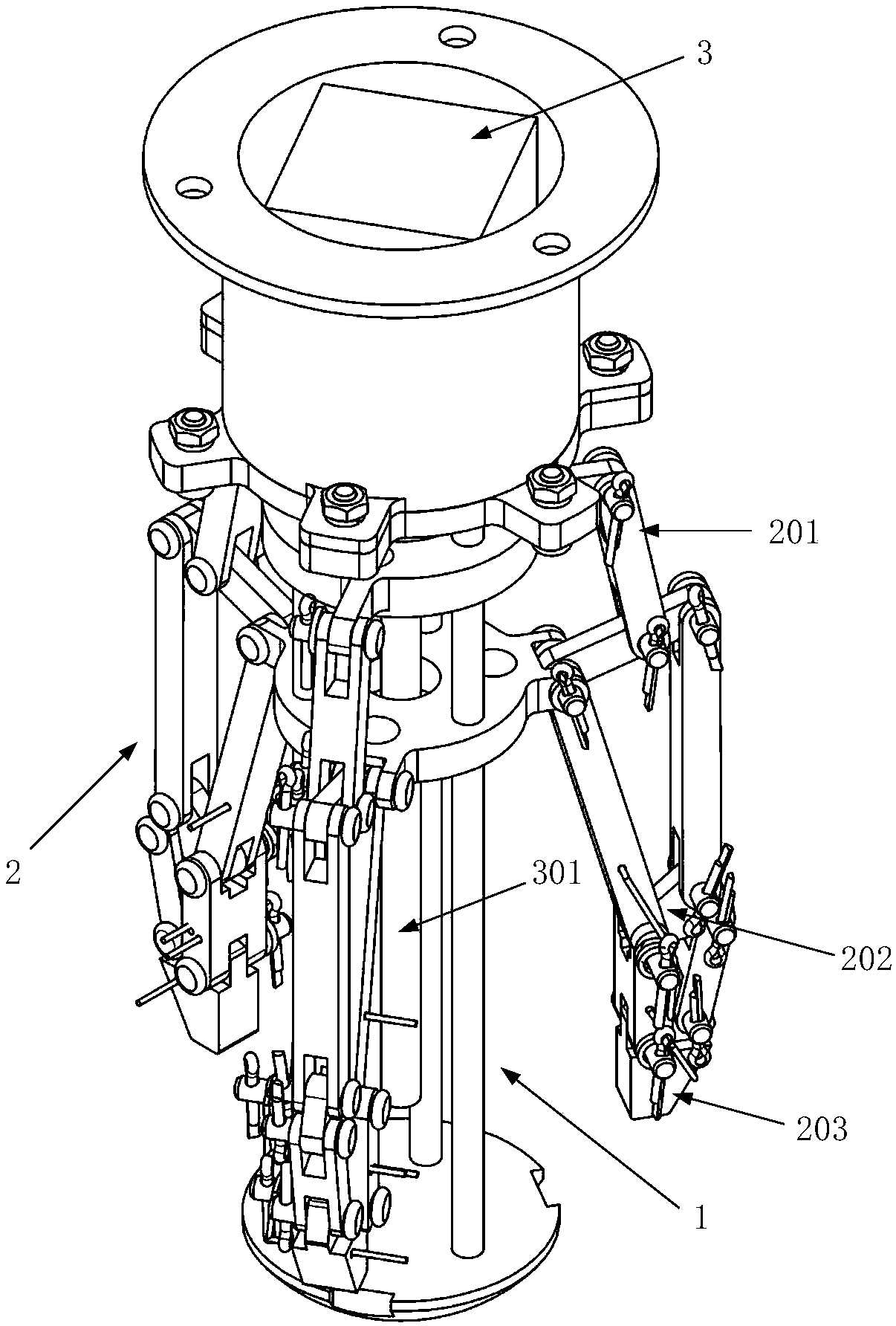
[0028] The present invention designs a mechanical claw for a multi-legged robot, which has a mechanical foot 1 and a manipulator 2, such as figure 1 shown.
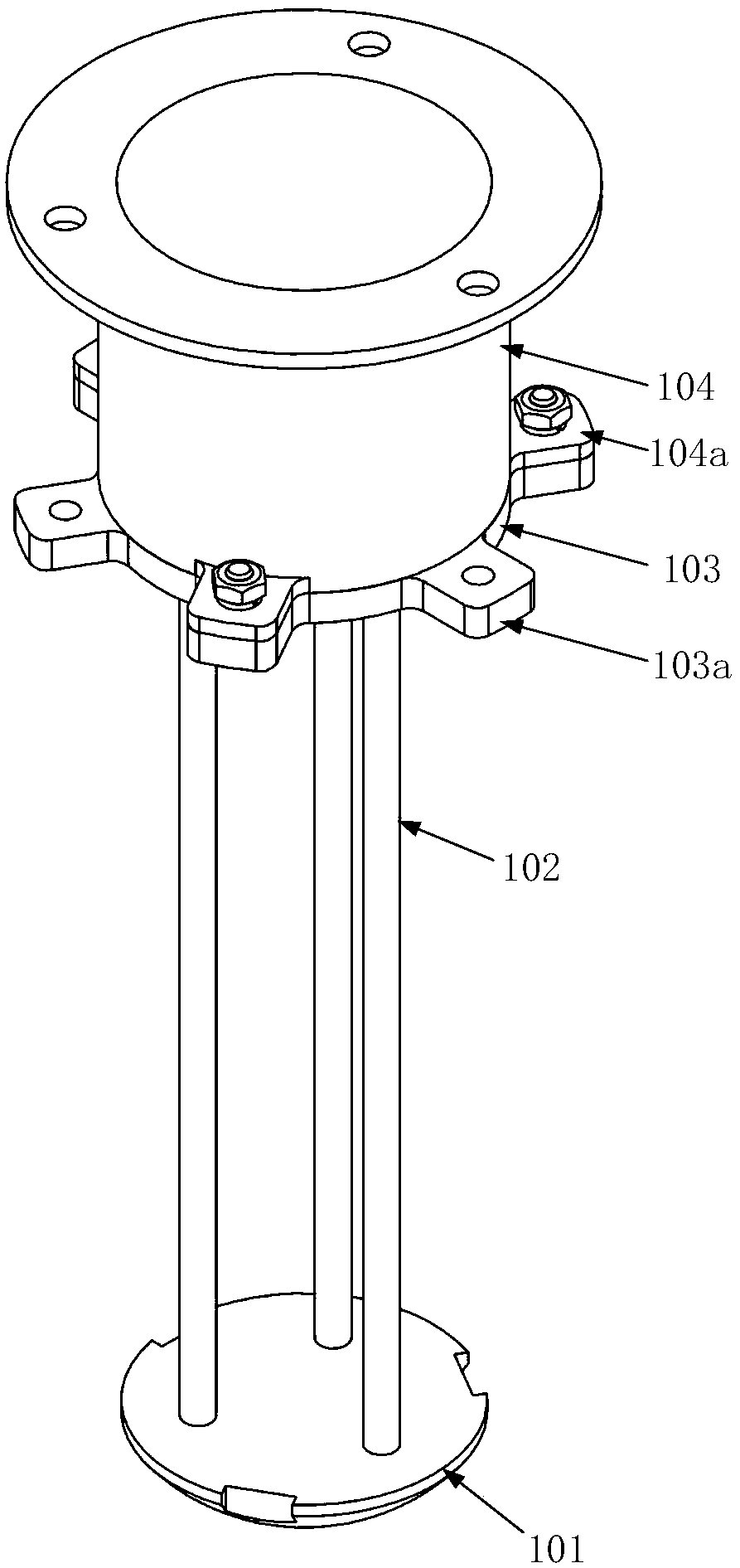
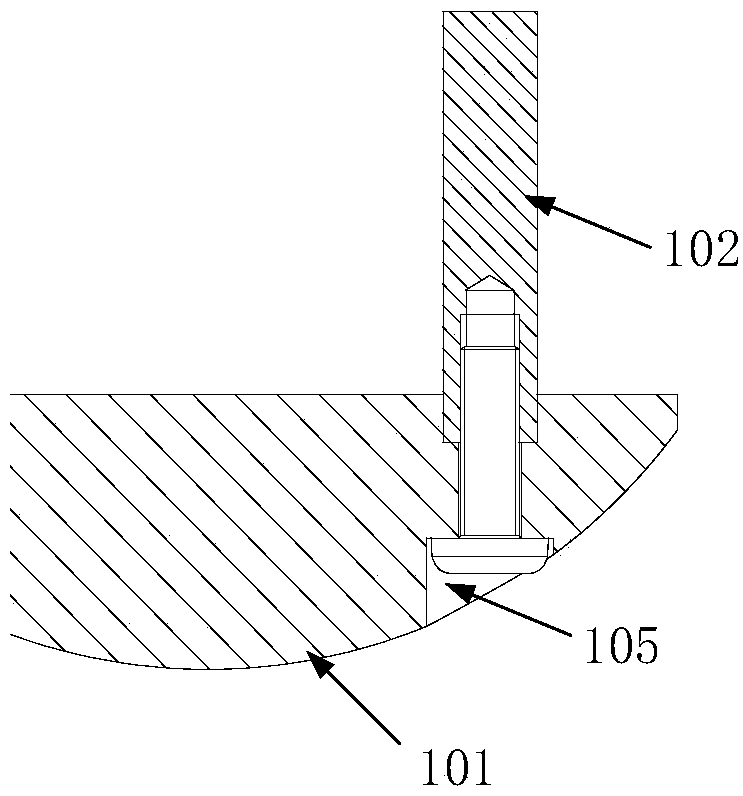
[0029] The mechanical foot 1 includes four parts: sole 101, support rod 102, lower fixing part 103 and upper fixing part 104, as shown in Fig. 2 . Among them, the lower part of the sole 101 is a spherical arc surface, which realizes a spherical hinge contact with the ground, has a relatively large bearing area, and can maintain the structural stability of the robot, making the robot suitable for various complex terrains. The upper part of the sole 101 is a plane for installing the support rod 102 . There are three support rods 102, vertically arranged, evenly distributed in the circumferential direction, and the bottom end is fixed with the sole 101 after passing through the flat concave hole 105 desig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More