PID controller design method
A design method and controller technology, applied in the field of PID controllers, can solve problems such as massive numerical calculations, unfavorable practical applications, failure to guarantee system stability, gain disturbance robustness, etc., and achieve the effect of reducing degrees of freedom and difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0040] The concept, specific structure and technical effects of the present invention will be clearly and completely described below in conjunction with the embodiments and accompanying drawings, so as to fully understand the purpose, features and effects of the present invention. Apparently, the described embodiments are only some of the embodiments of the present invention, rather than all of them. Based on the embodiments of the present invention, other embodiments obtained by those skilled in the art without creative efforts belong to The protection scope of the present invention.
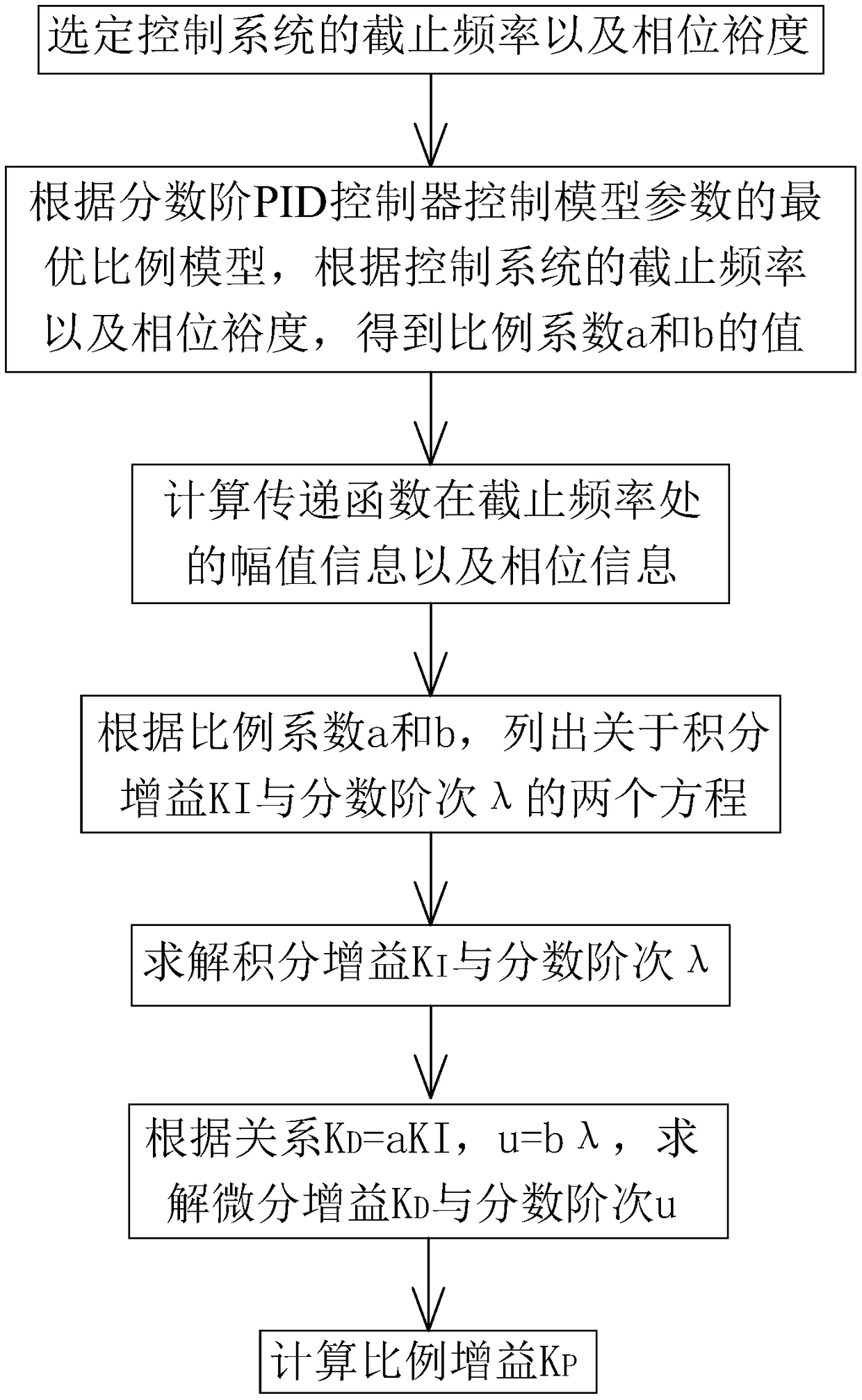
[0041] refer to figure 1 , the present invention discloses a PID controller design method, setting the control model of the PID controller, as shown in formula 2:
[0042]
[0043] where K P is the proportional gain, K I is the integral gain, K D is the differential gain, λ is the integral order, u is the differential order, and s is the Laplace operator;
[0044] K in formula 2 D =aK ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More