

Mobile robot visual localization method based on improved Apriltag tags
A mobile robot and visual positioning technology, which is applied in the direction of instruments, navigation, surveying and navigation, etc., can solve the problems of increasing system processing time, taking a long time, and spending a lot of time, so as to reduce the amount of data, improve real-time performance, and reduce time. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0030] In order to illustrate the technical scheme and technical purpose of the present invention, the present invention will be further introduced below in conjunction with the accompanying drawings and specific embodiments.
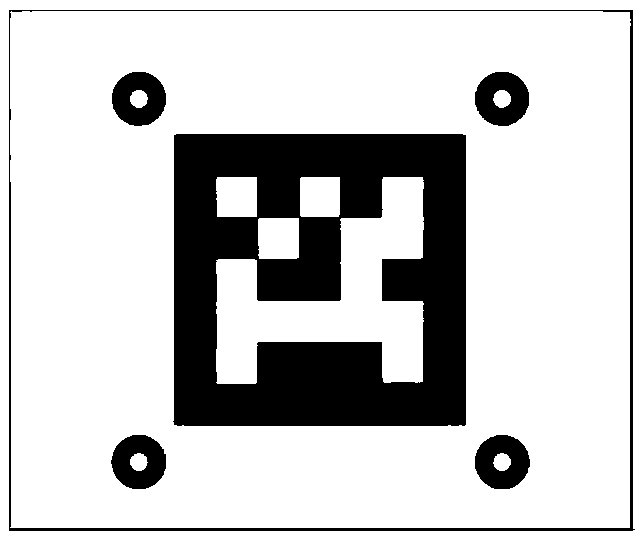
[0031] combine Figure 1-Figure 9 , the improved Apriltag tag-based virtual studio mobile robot visual positioning method of the present invention, a basler industrial camera is mounted on a six-axis indoor photography robot platform, and the artificial tag images that have been arranged in advance in the field of view are collected, identified, method of positioning. Add a total of 4 ring markers of the same size at the appropriate length of the diagonal extension of the original label quadrilateral, such as image 3 As shown, consider adding markers that can be quickly located to identify the position of the ROI in the image. Considering that there will be certain straight line features in the indoor environment, and a large number of straight line f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More