

Potato image acquisition device based on RGB-D cameras and method for identifying and locating bud eye
A technology of an image acquisition device and a positioning method, which is applied in image enhancement, image analysis, image data processing, etc., can solve the problems of small area ratio, low resolution of depth images, and inability to ensure that potato features are fully covered, so as to improve accuracy. efficiency, high precision, and the effect of improving precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in further detail below in conjunction with the accompanying drawings.
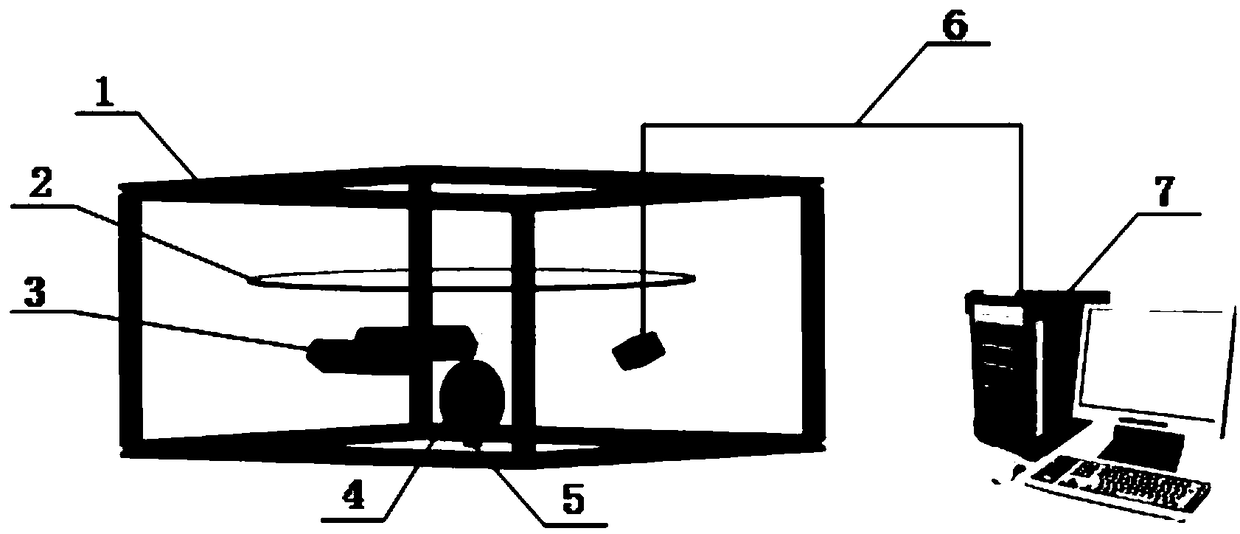
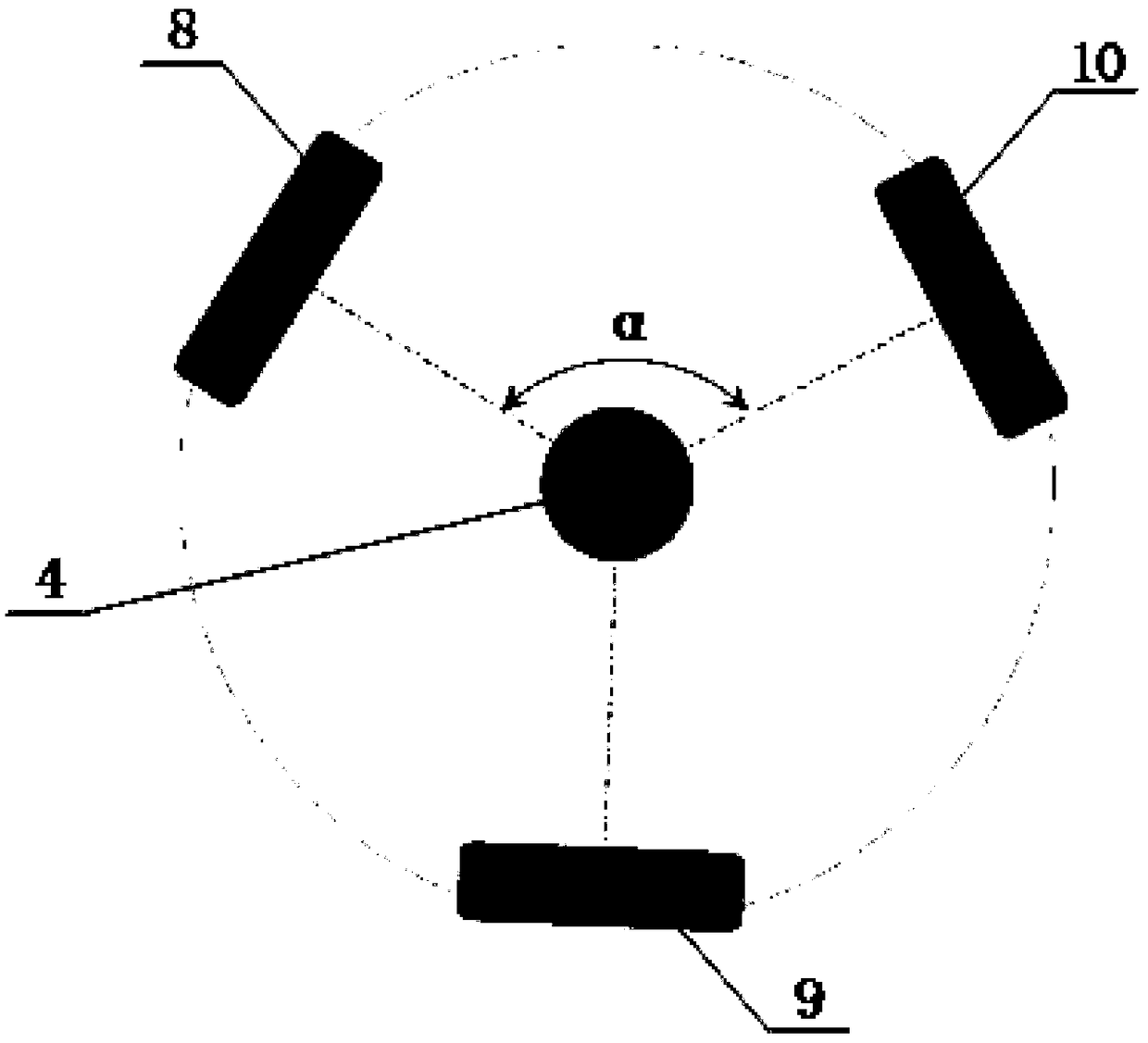
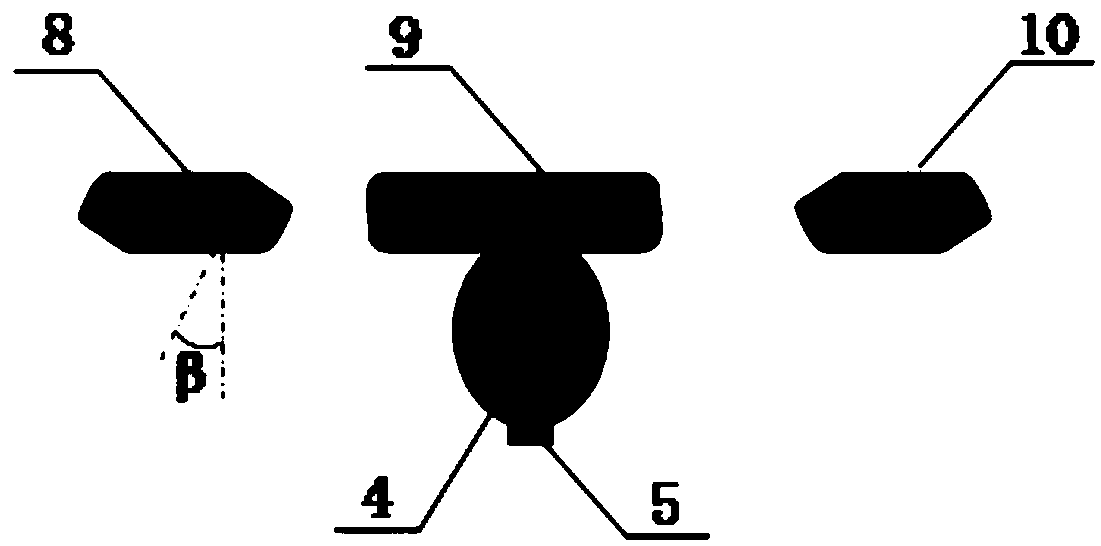
[0040] Firstly, the three RGB-D cameras of the image acquisition module are calibrated. According to attached figure 1 To attach image 3 The relative positions of the three RGB-D cameras are fixed as shown, so that the three RGB-D cameras are distributed at a relative position of a central angle of 120 degrees on the circumference of the plane where the image acquisition module 3 is located with the center point as the center, and each RGB-D The vertical distance from the center of the lens plane of the camera to the central axis of the sample holder is 35 cm, and the included angle between the lens plane of each RGB-D camera and the vertical line of the plane where the image acquisition module 3 is located is 30 degrees. The calibration method uses Zhang Zhengyou’s calibration method to obtain the internal parameters of the color camera and depth camera o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More