

Primate bionic robot driven by pneumatic muscles
A bionic robot and pneumatic muscle technology, applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems of reducing flexibility, increasing the weight of robots, and losing the flexibility of primate claws, so as to reduce costs and reduce weight , the effect of good bionic effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The specific implementation manners of the present invention will be further described below in conjunction with the drawings and technical solutions.
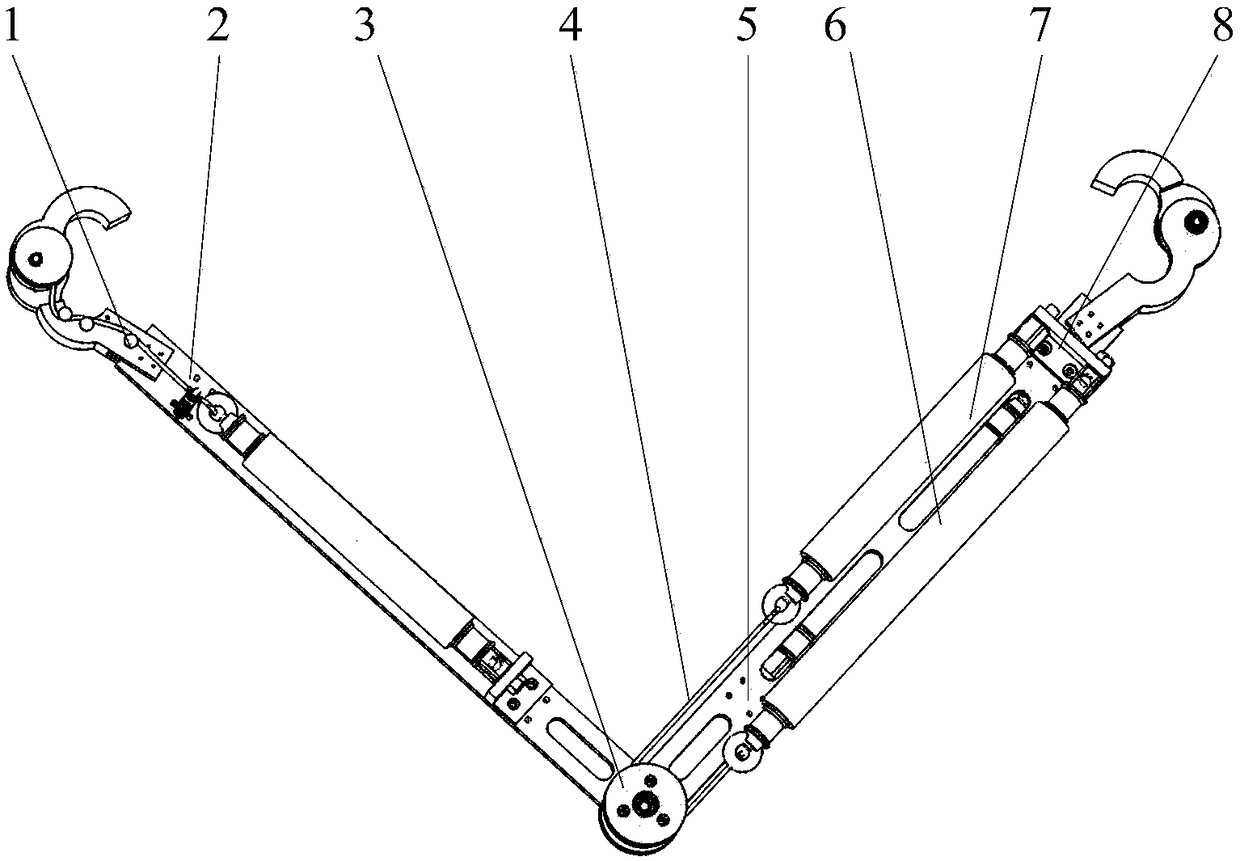
[0026] From figure 1 , as shown in 2, a primate bionic robot driven by pneumatic muscles, including bionic gripper 1, arm A2, active joint force wheel 3, arm B4, joint driving wire rope 5, joint driving pneumatic muscle A6, joint driving pneumatic muscle B7, pneumatic muscle mount 8, shaft 9 and bearing 10;
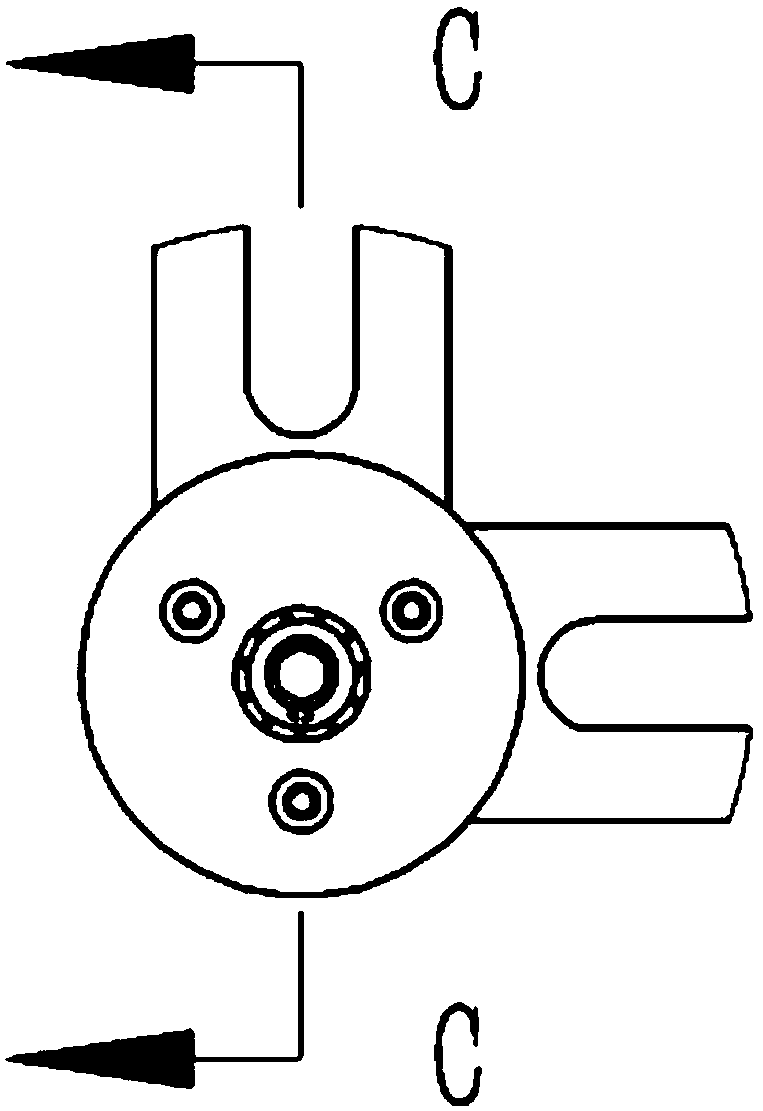
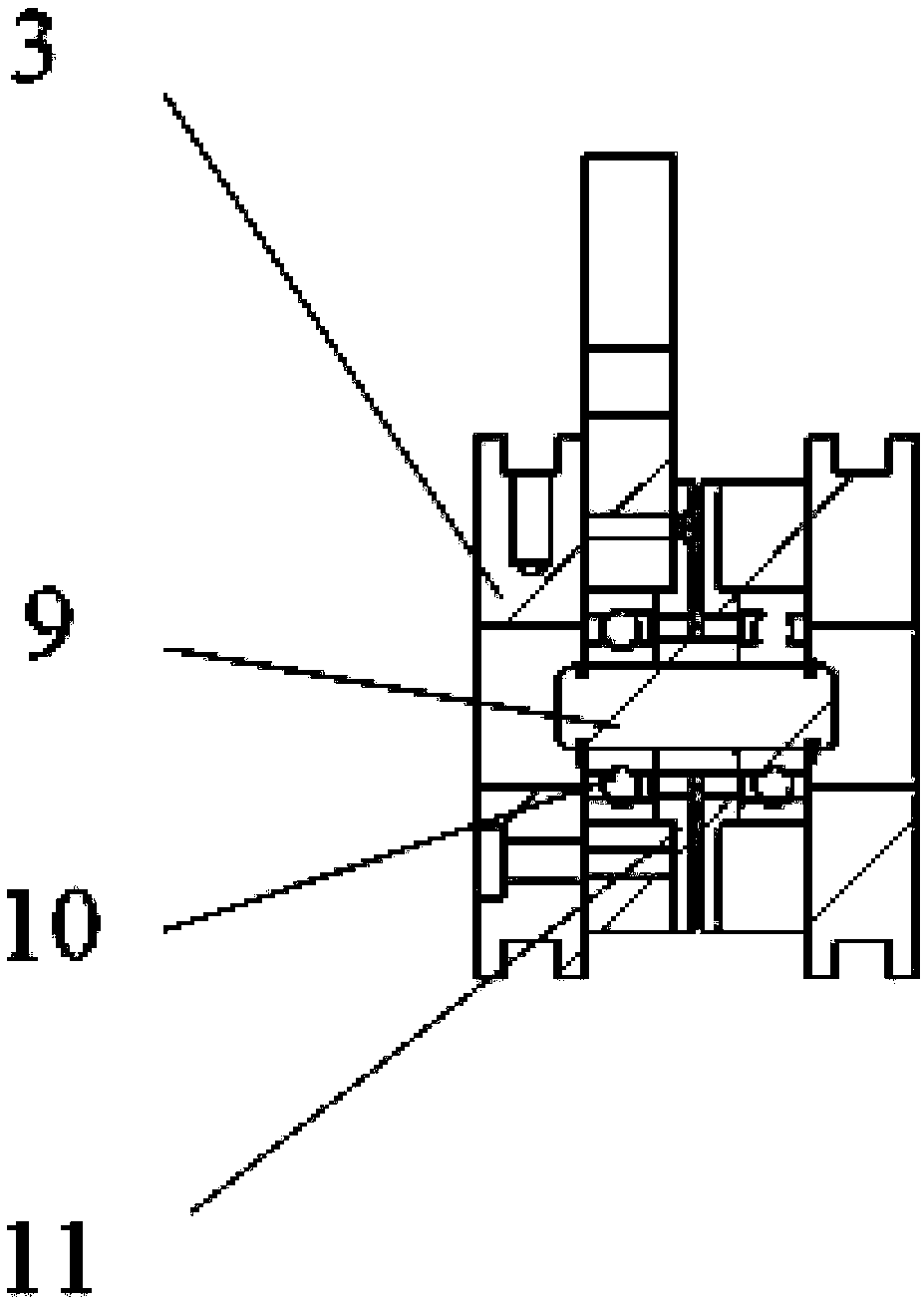
[0027] The bionic gripper 1 is connected to the arm A2, the arm A2 and the arm B4 are connected through the shaft 9, and the bearing 10 is set outside the shaft 9 to realize the rotation of the arm A2 and the arm B4; the active joint force wheel 3 is fixed to the shaft end of the arm A2, The active joint force wheel 3 rotates to drive the arm A2 to rotate, the other end of the arm B4 fixes the pneumatic muscle mounting seat 8, and one end of the joint driving pneumatic muscle A6 and joint driving pneumatic muscle ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More