

An End-to-End Unsupervised Scenario Passable Region Cognition and Understanding Approach
A traffic area, unsupervised technology, applied in the field of traffic control, can solve the problems of the adverse effects of smart cars, unsatisfactory effects, and high radar costs, and achieve the effects of good real-time and robustness, good real-time performance, and strong applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention is described in further detail below in conjunction with accompanying drawing:
[0030] Such as figure 1 As shown, an end-to-end unsupervised scene road area determination method includes the following steps:
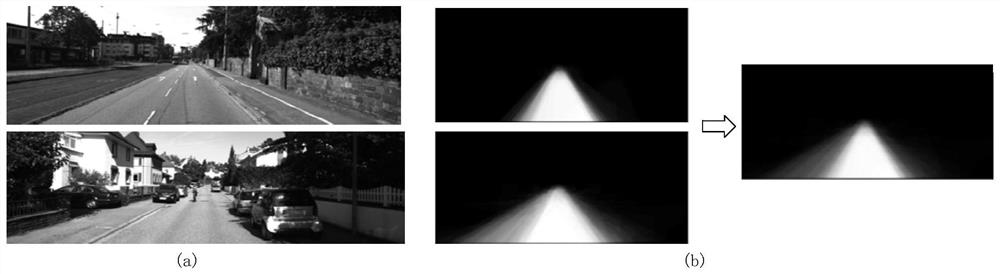
[0031]1) Using the distribution law of the road area in space and images, the road location prior probability distribution map is constructed based on statistics and directly added to the convolutional layer as a feature map of the detection network, and the location prior information is constructed in the The prior probability distribution map of the location of the passable area that can be flexibly applied in the actual road traffic environment;
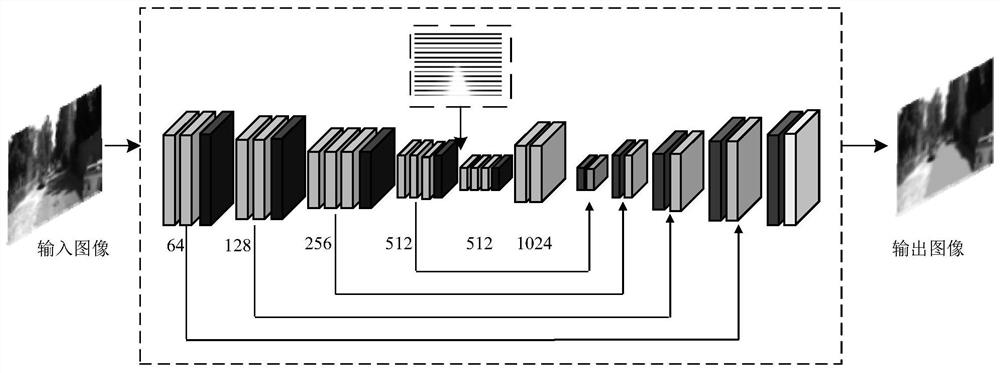
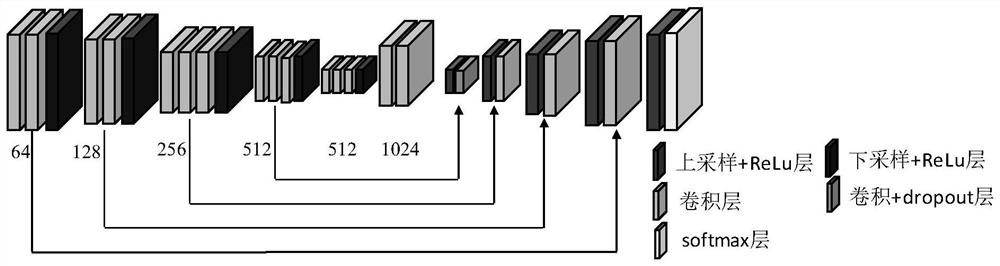
[0032] 2), Aiming at the cognition and understanding method of the passable area, which is the problem of road surface detection and segmentation, a new deep network architecture—UC-FCN network is constructed by combining the fully convolutional network (FCN) and U-NET, as the main network for ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More