

A binocular vision obstacle avoidance wheeled robot based on SLAM
A wheeled robot and binocular vision technology, applied in the field of computer vision, can solve problems such as poor real-time performance, susceptible to environmental interference, low precision, etc., to achieve improved real-time performance and accuracy, good real-time performance and high precision high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
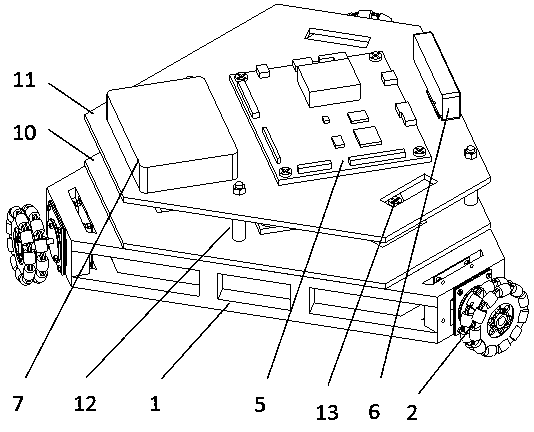
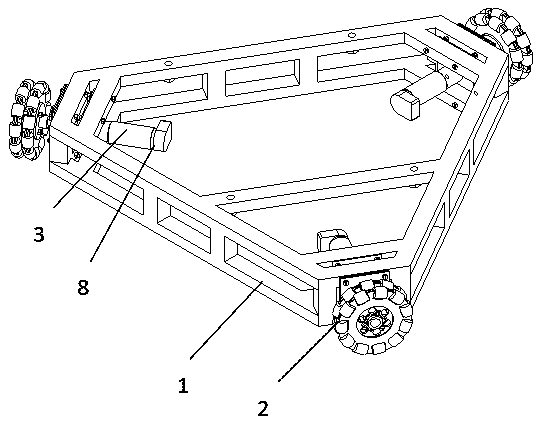
[0052] This embodiment provides a SLAM-based binocular vision obstacle avoidance wheeled robot, such as figure 1 , including a triangular aluminum alloy chassis frame 1, three symmetrically distributed wheels 2 arranged at the top corners of the chassis frame 1, and a driving device 3 for driving the wheels 2 to move. The chassis frame 1 is provided with an stm32 bottom control board 4, NVIDIA tx2 development board 5, a binocular vision camera 6, a power supply device 7 for providing power to the NVIDIA tx2 development board 5, an encoder 8 and an attitude sensor 9 for detecting the position and speed of the robot.
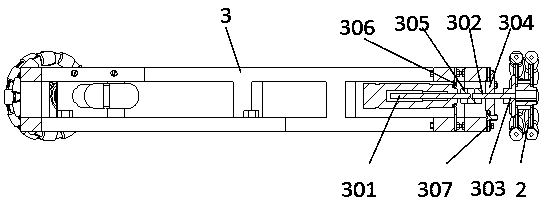
[0053] Specifically, as figure 2 and 3 , in this embodiment, the driving device 3 includes a MAXON motor 301 arranged on the chassis frame 1 and a flange 303 for fixing the drive shaft 302 and the wheel 2, the flange 303 is arranged on the flange bearing 304, and the motor The motor shaft of 301 is fixed to the transmission shaft 302 through a coupling 305; the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More