

Robot joint moment balancing device
A robot joint and torque balance technology, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of lossy drive motor and reducer life, brake failure, and potential safety hazards, and achieve compact structure and torque balance , the effect of taking up little space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Through the description of the embodiments below, the specific implementation of the present invention includes the shape, structure, mutual position and connection relationship between the various parts, the function and working principle of each part, the manufacturing process and the operation and use method of the various components involved. etc., to make further detailed descriptions to help those skilled in the art have a more complete, accurate and in-depth understanding of the inventive concepts and technical solutions of the present invention.
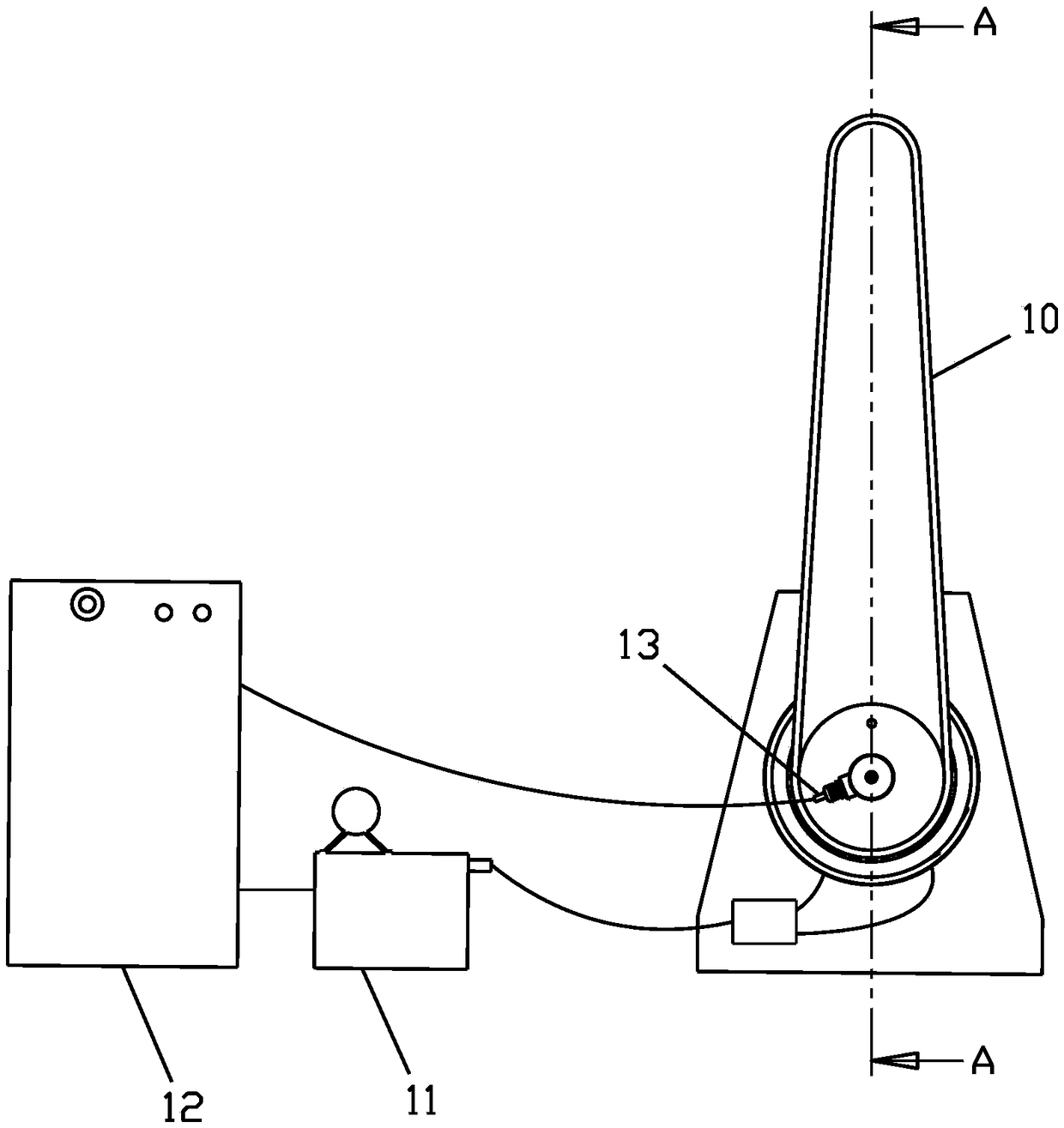
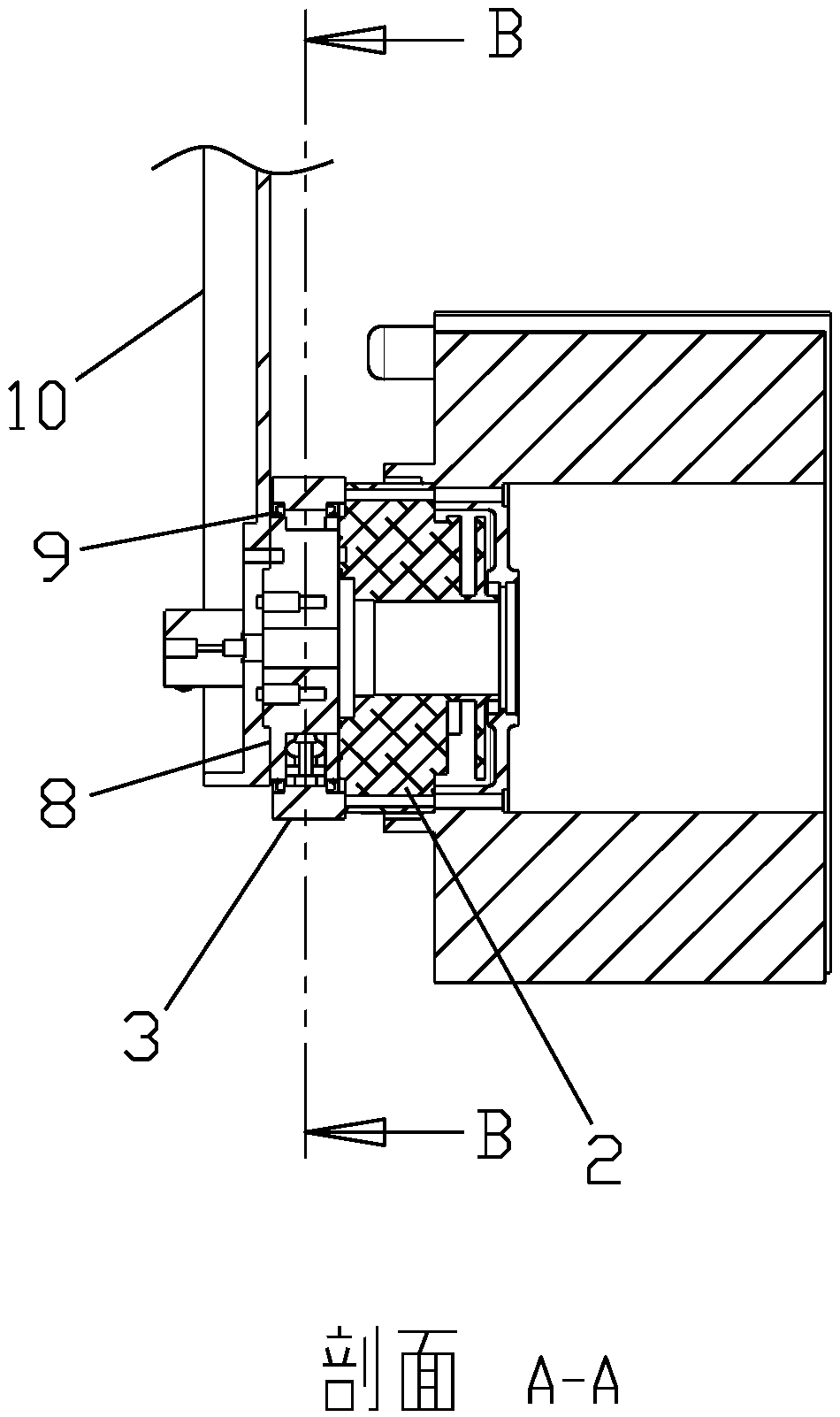
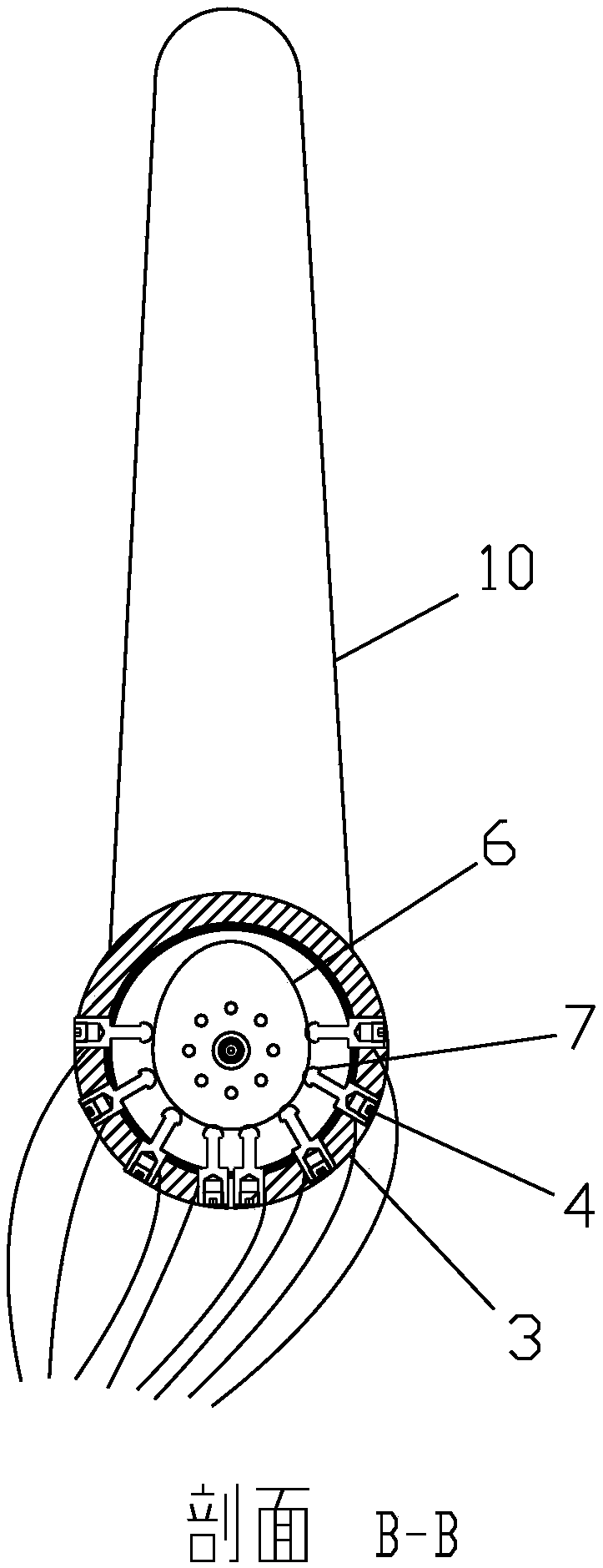
[0026] Such as Figure 1 to Figure 5 As shown, a robot joint torque balance device includes an eccentric cam 6, the central axis of the eccentric cam 6 is fixedly connected to the output end of the RV reducer 2, the robot arm 10 is fixed on the eccentric cam 6, and the symmetric axis of the eccentric cam 6 There is a fixed angle with the centerline of the robot arm 10, preferably 0° or 180°. The eccentric cam 6 is pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More