

Autonomous matching test system for integral time of space camera in super-agility dynamic imaging
A technology of integration time and imaging space, which is applied in the field of self-matching test system of camera integration time in ultra-agile dynamic imaging space, which can solve the problems of poor control accuracy and rotation stability, difficulty in simulating dynamic imaging mode, limited rotational speed of mechanical rotating shaft targets, etc. problem, to achieve the effect of ensuring sufficiency, eliminating delay, and realizing synchronization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
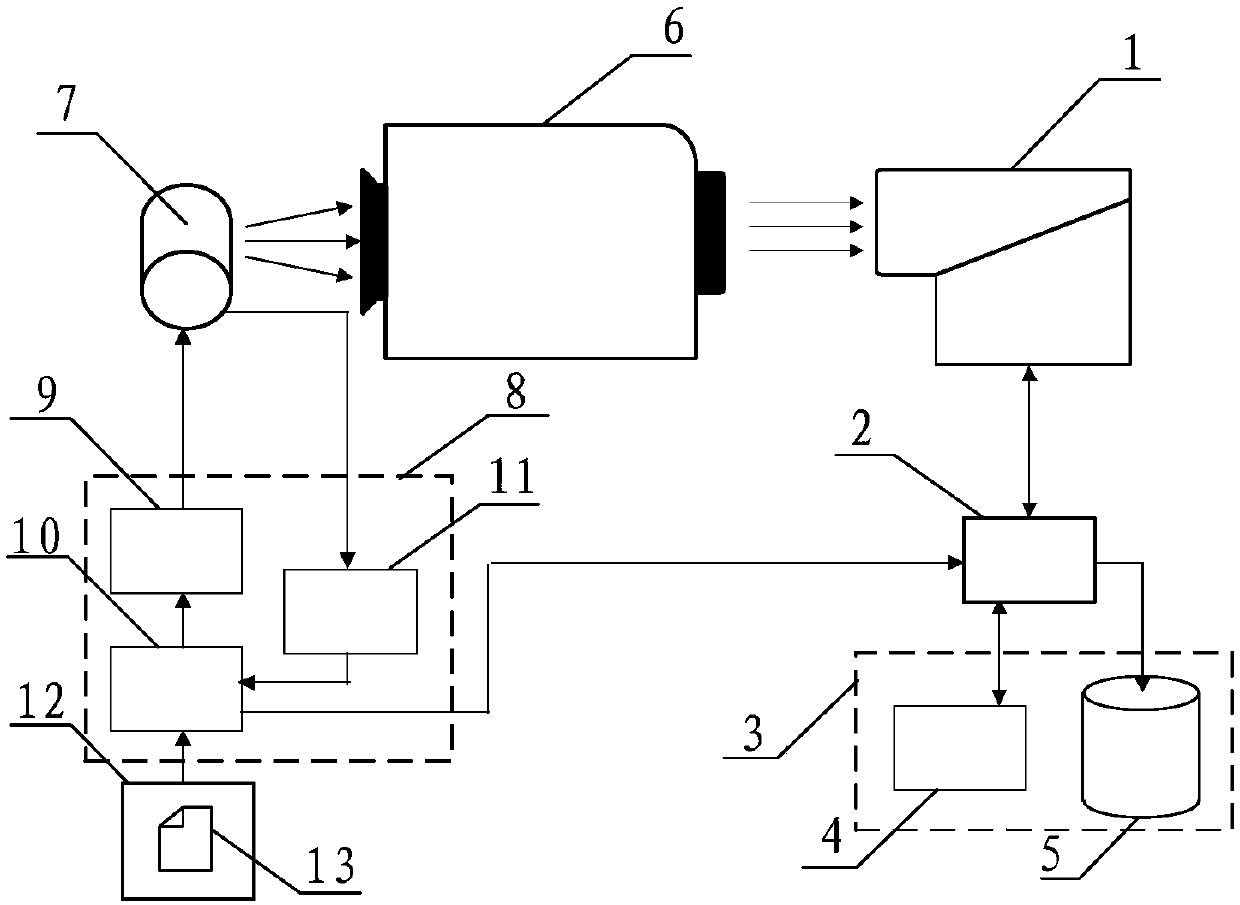
[0040] Aiming at the deficiencies of the prior art, the present invention proposes a super-agile imaging space camera integration time autonomous matching test system, including four parts: the space camera subsystem, the camera ground detection subsystem, the collimator and the dynamic scene simulation subsystem. .
[0041] The space camera subsystem includes the camera body and camera electronics. The camera body includes a camera lens, a camera focal plane and a supporting frame. The camera lens gathers the parallel light from the collimator on the focal plane of the camera, and the focal plane of the camera converts the light signal into an electrical signal, and the supporting frame is used to connect the camera lens and the focal plane of the camera, and each part is composed of a complete structure; the camera Electronics include camera integrated electronics unit and image processing unit. The integrated electronic unit receives instructions from the control and dete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More