

Aircraft height control method and system based on radar technology
A technology for altitude control and aircraft, applied in the field of radar systems, it can solve the problems such as the more demanding accuracy requirements of the multi-frequency to dual-frequency method, the frequency limit of the transmission signal for the altitude measurement distance, and the many frequency points of the secondary phase method. Facilitate high-precision control, improve phase measurement accuracy, and increase the effect of distance measurable range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
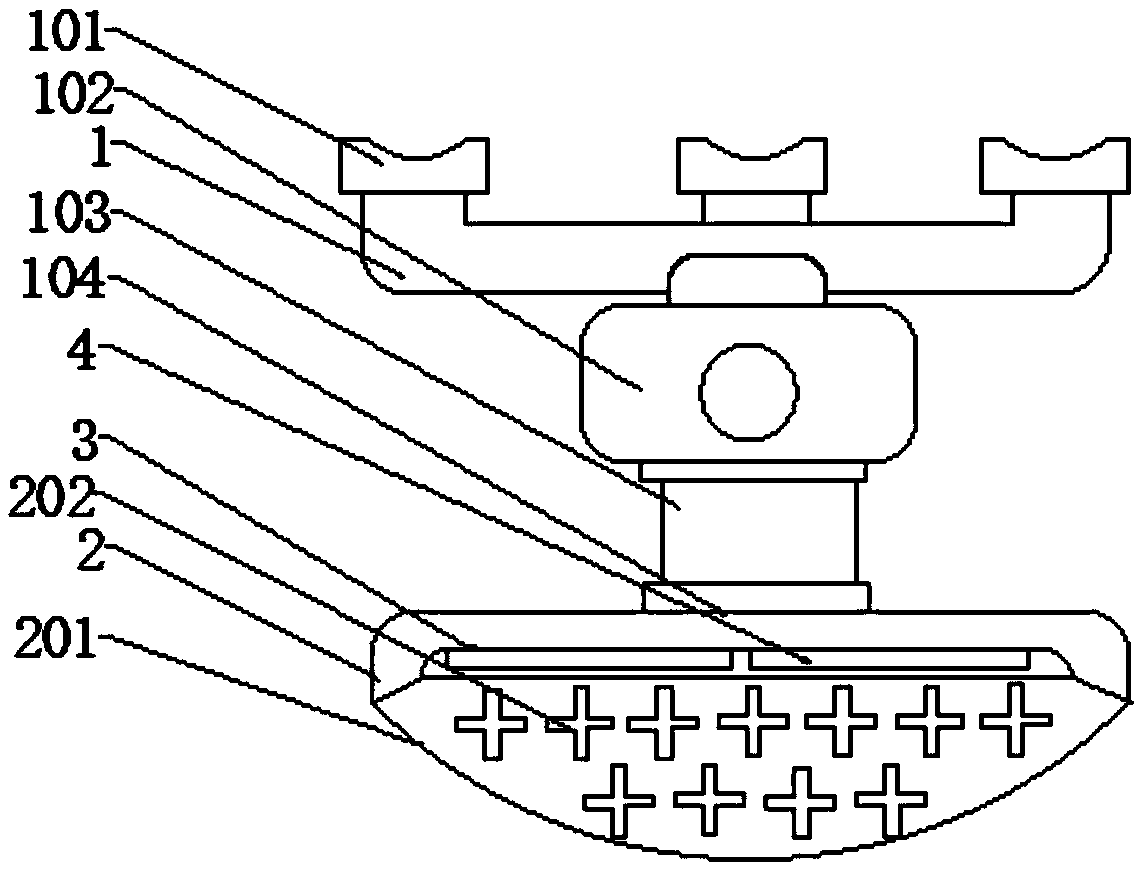
[0035]Such as figure 1 As shown, the present invention provides an aircraft height control method and system based on radar technology, including an omnidirectional rotating base 1 fixedly mounted on the aircraft, and the omnidirectional rotating base 1 is fixed upside down on the lower surface of the aircraft, And the shielding shield 2 for reducing external signal interference is installed on the omnidirectional rotating base 1, and the radar ranging unit 3 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More