

Robot calibration method based on improved differential evolution algorithm
An evolutionary algorithm and calibration method technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems that cannot meet the requirements of identification accuracy, identification efficiency, and convergence at the same time, so as to improve identification accuracy and efficiency, fast convergence rate, Improve the effect of poor global convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0028] The technical solutions in the embodiments of the present invention will be clearly and completely described below.
[0029] A robot calibration method based on an improved differential evolution algorithm, which is used for calibration of geometric parameters of a six-degree-of-freedom industrial robot, specifically includes the following steps:
[0030] Step 1, establishing a robot kinematics model;
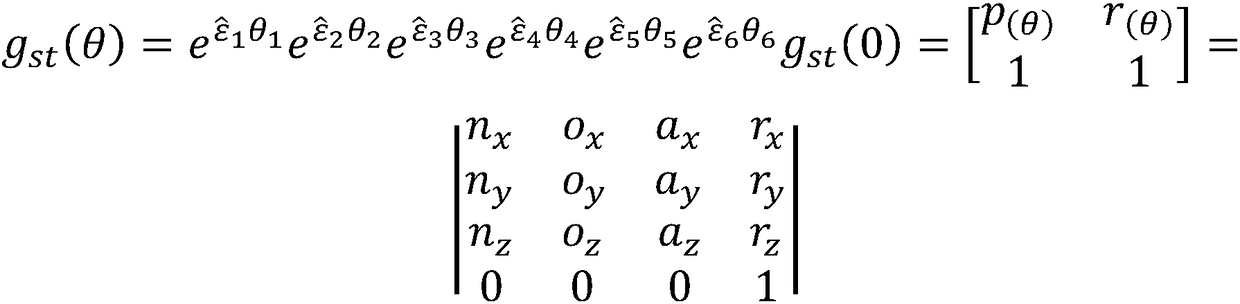
[0031] The kinematics model is established according to the screw theory and the theoretical structural parameters of the robot. The specific formula is as follows:
[0032]
[0033] where g st (0) is the pose matrix of the robot at zero position, and the matrix exponential form of the revolving joint and motion screw can be expressed as where q=[q x ,q y ,q z ] indicates the position coordinates of the origin of each rotation axis of the robot, w = [w x ,w y ,w z ] represents the direction vector of each rotation axis. Therefore, the function to calculate t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More