

Real-time hand tracking method based on depth sensor
A depth sensor and hand technology, applied in the field of human-computer interaction, to achieve the effect of improving real-time performance, improving accuracy, and improving extraction efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
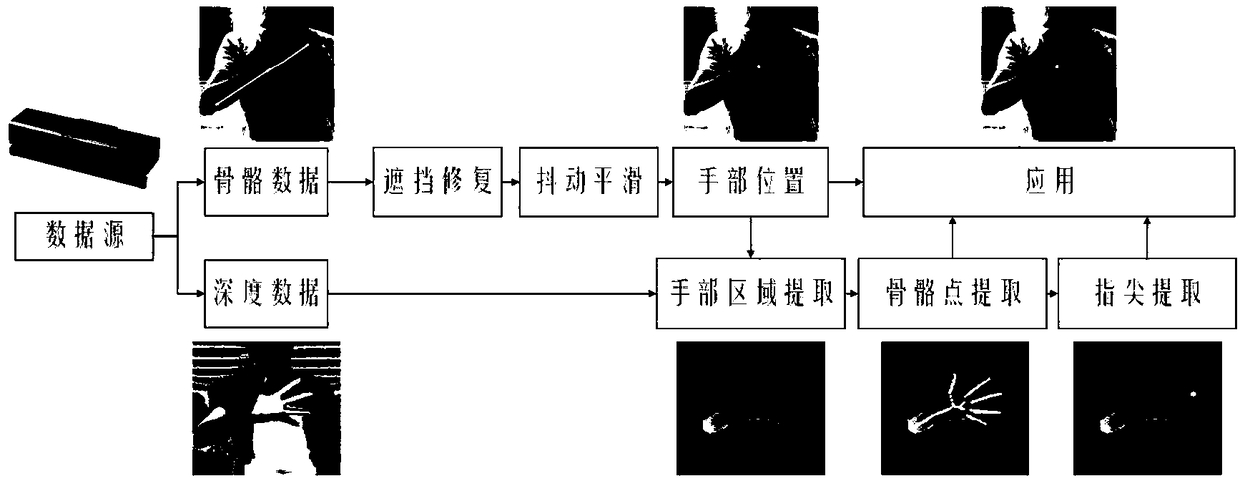
[0042] This embodiment provides a real-time hand motion tracking method based on a depth sensor, the specific process is as follows figure 1 shown, including the following steps:
[0043] Step 1: Raw data optimization;
[0044] Step 1.1: Occlusion recovery; when the hand is occluded or partially occluded, the real-time data fed back by the depth sensor will shake violently, and the reliability of the data is not high. At this time, it is necessary to predict the position of the joints that are not tracked by the depth sensor. In this paper, the combination of depth data and bone data provided by the depth sensor Kinect is used to repair the occluded hand joints. Due to the length invariance of human bones, the joint chain is composed of elbows, hands, wrists, and fingertips, and the length between each adjacent joint is calculated, that is, the length of the joint is compared with the standard human skeleton as the basis for occluded joint repair. in accordance with. Two po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More