

Method for solving robot inverse kinematics based on particle swarm optimization algorithm
A particle swarm optimization and inverse kinematics technology, applied in instruments, calculations, calculation models, etc., to solve problems such as getting stuck in local optimal solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
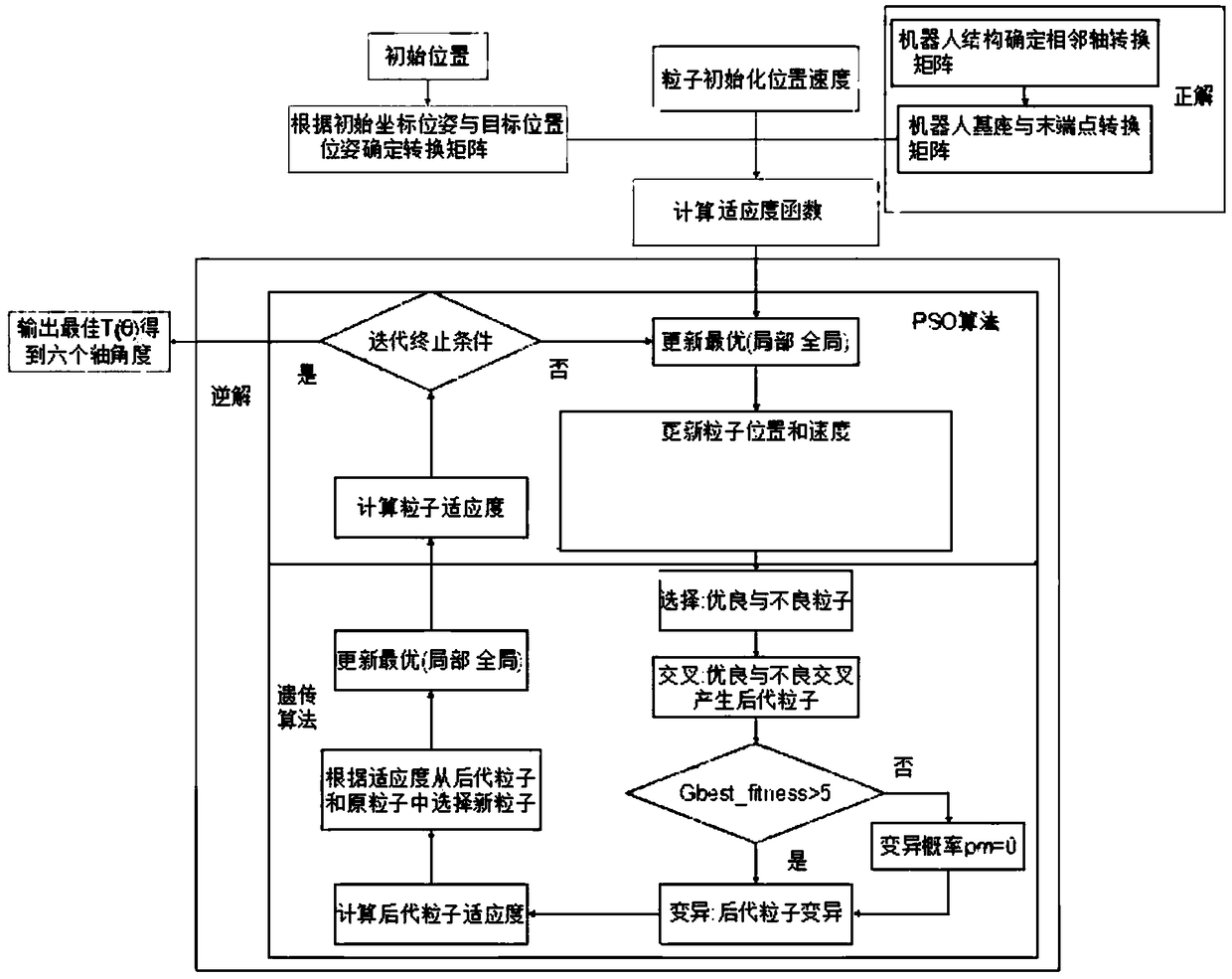
[0026] The positive kinematic solution of the robot is to obtain the end pose state of the robot hand according to the angles of the six joints of the robot. There is a transformation matrix between each joint axis, and there are four elements in each matrix: rod length, deflection angle, lateral distance, and rotation angle. Attributes, multiply the six transformation matrices to get the coordinate pose transformation matrix of the six-axis robot from the base to the end of the manipulator. As shown in Formula 1:
[0027]
[0028] Each transformation matrix determines the transformation mode of the coordinate system between the joints according to the post-position method. The post-position method is to establish the fixed coordinate system at the lower joint, and the transformation of the coordinate axis is to first rotate around the x-axis by an angle of α, and then Perform the translation of the x-axis and the z-axis, and finally perform the θ angle of rotation around t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More