

Double-clutch active planetary gear train obstacle crossing robot and control method thereof
A technology of planetary gear train and double clutch, which is applied in the direction of wheels, motor vehicles, transmission devices, etc., can solve the problems of complex structure and control of legged robots, performance needs to be improved, complex structure, etc., and achieve good road surface adaptability and good application Promotion prospects, good shock absorption performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0038] In order to further set forth the technical scheme of the present invention and its working process, in conjunction with the accompanying drawings, the specific implementation of the present invention is as follows:
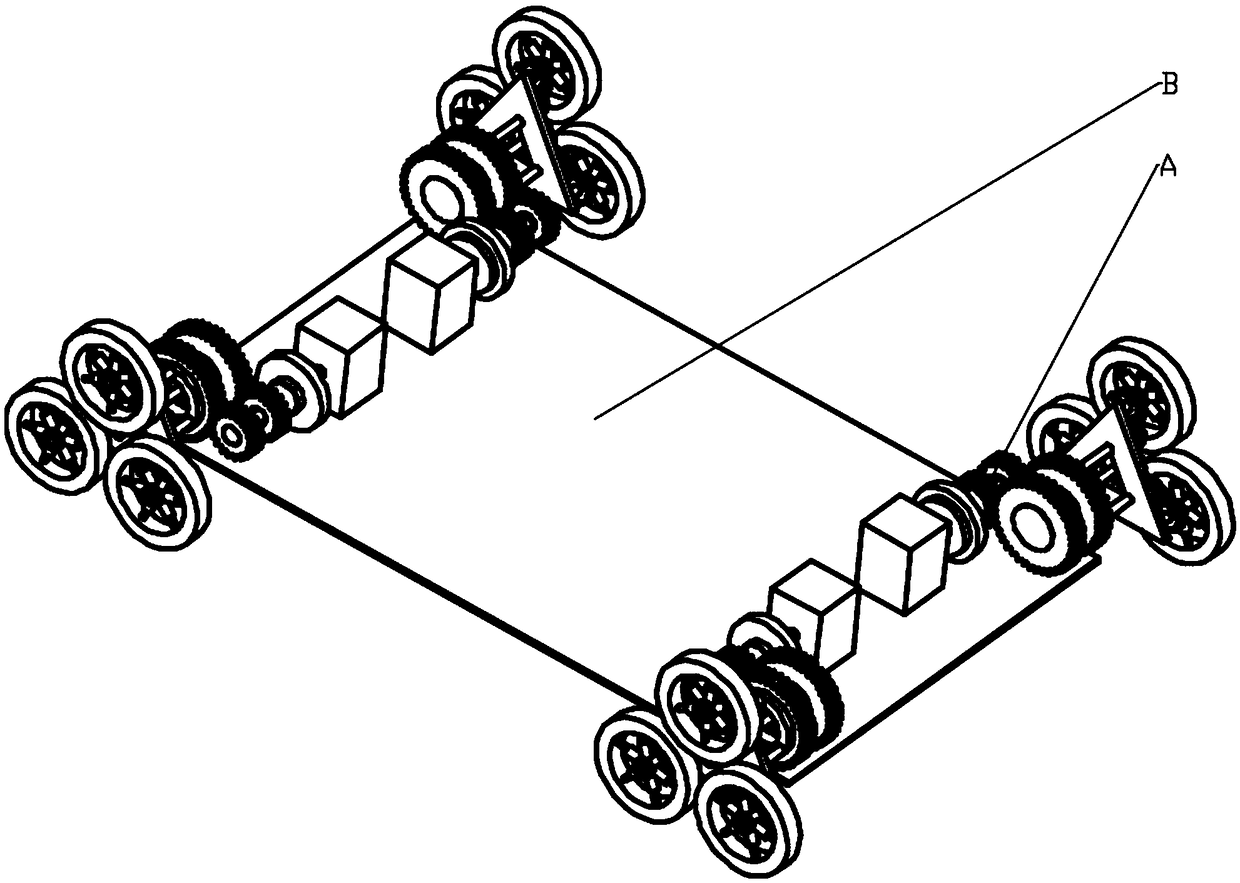
[0039] Such as figure 1 As shown, the present invention discloses a dual-clutch active planetary gear system obstacle-climbing robot, which consists of a chassis B and four sets of planetary drive devices A symmetrically distributed in four directions, front, rear, left, and right of the chassis B. The planetary gears The driving device A is installed on the chassis B through the supporting connection assembly, and the chassis B is driven by the planetary wheel driving device A to complete the motions such as walking, overcoming obstacles, or climbing.
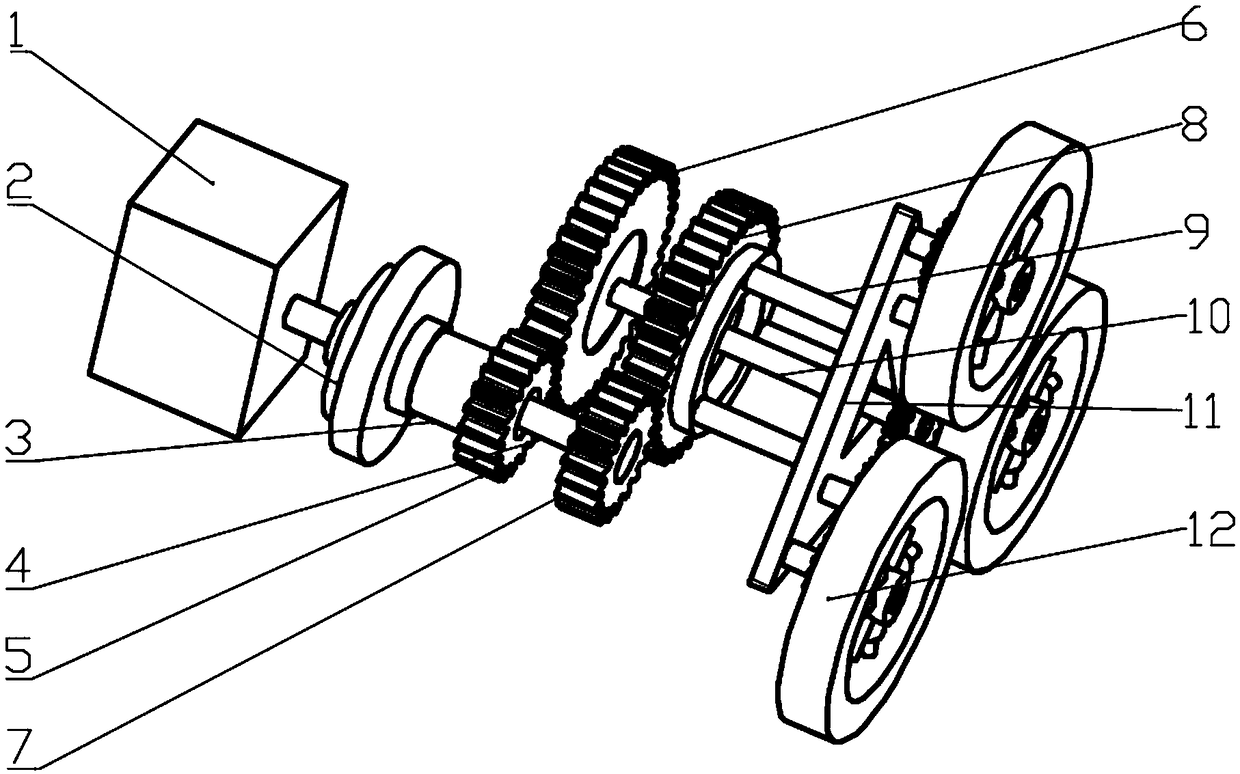
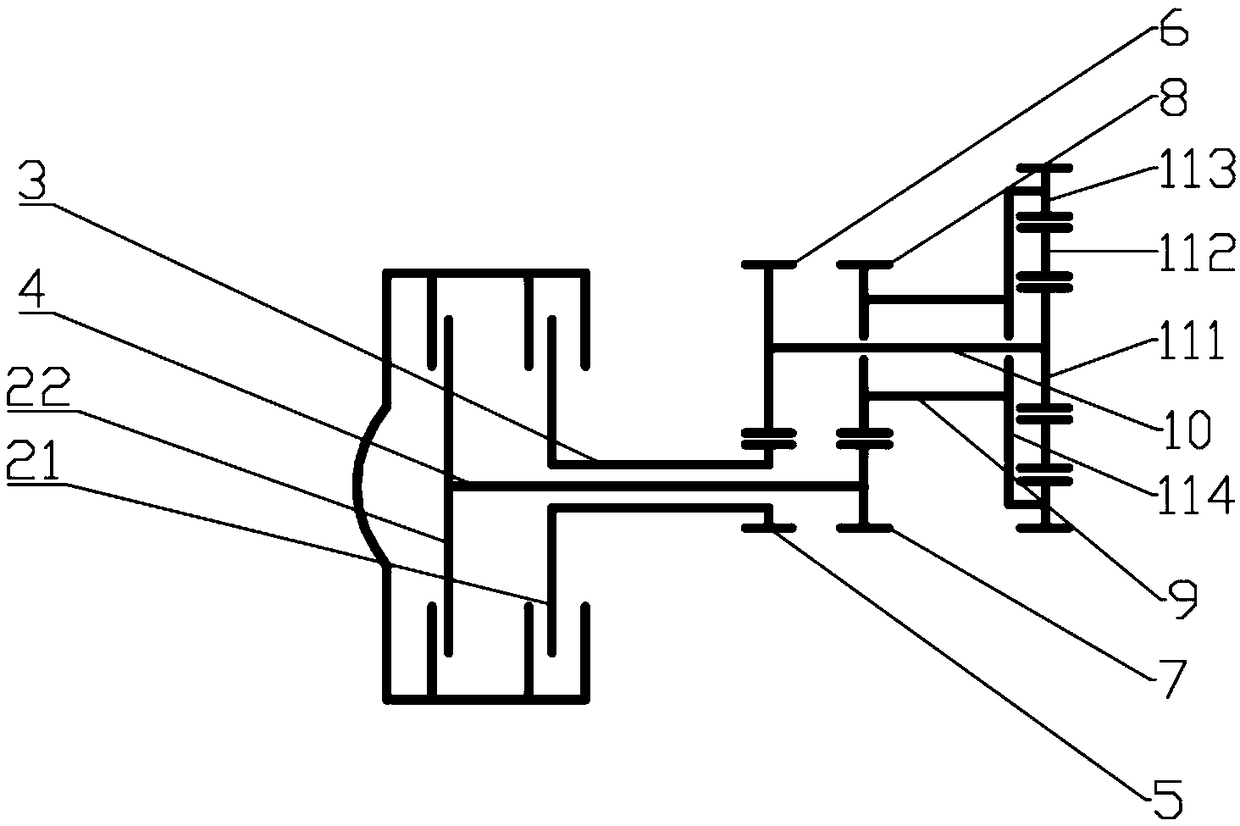
[0040] Such as figure 2 with image 3 As shown, the planetary gear drive A is composed of a drive motor 1, a double clutch 2, a hollow shaft sleeve 3, an input shaft 4, a first transmission gear 5, a se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More