

Lower limb assisting-type exoskeleton robot
A technology of exoskeleton robot and lower limbs, which can be applied in the direction of devices to help people walk, physical therapy, etc. It can solve the problems of being unable to walk for a long time, inconvenient to wear, and difficult to manufacture and assemble, so as to save power mechanism and control equipment, smooth and continuous Walking without power assistance, easy to carry
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
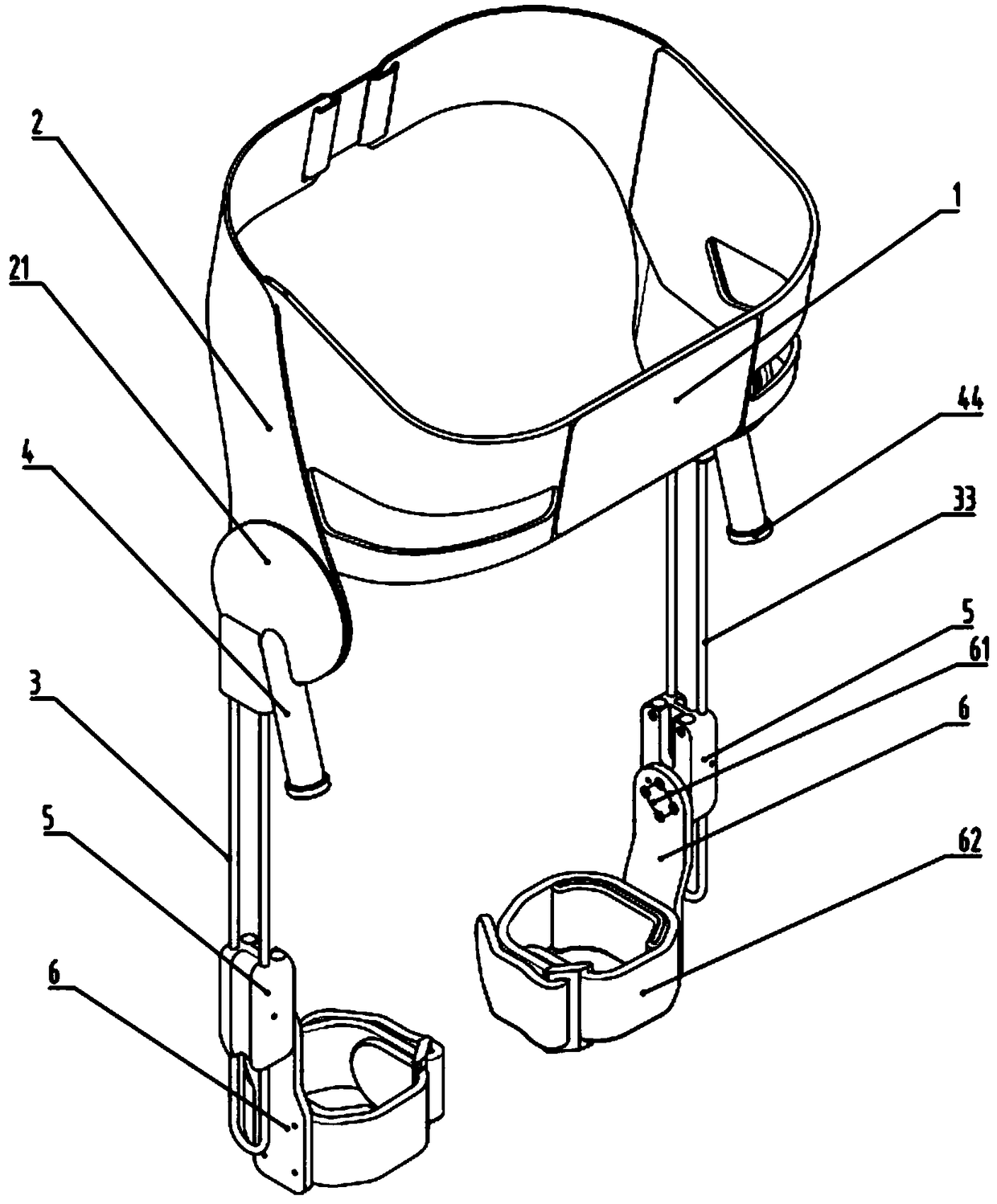
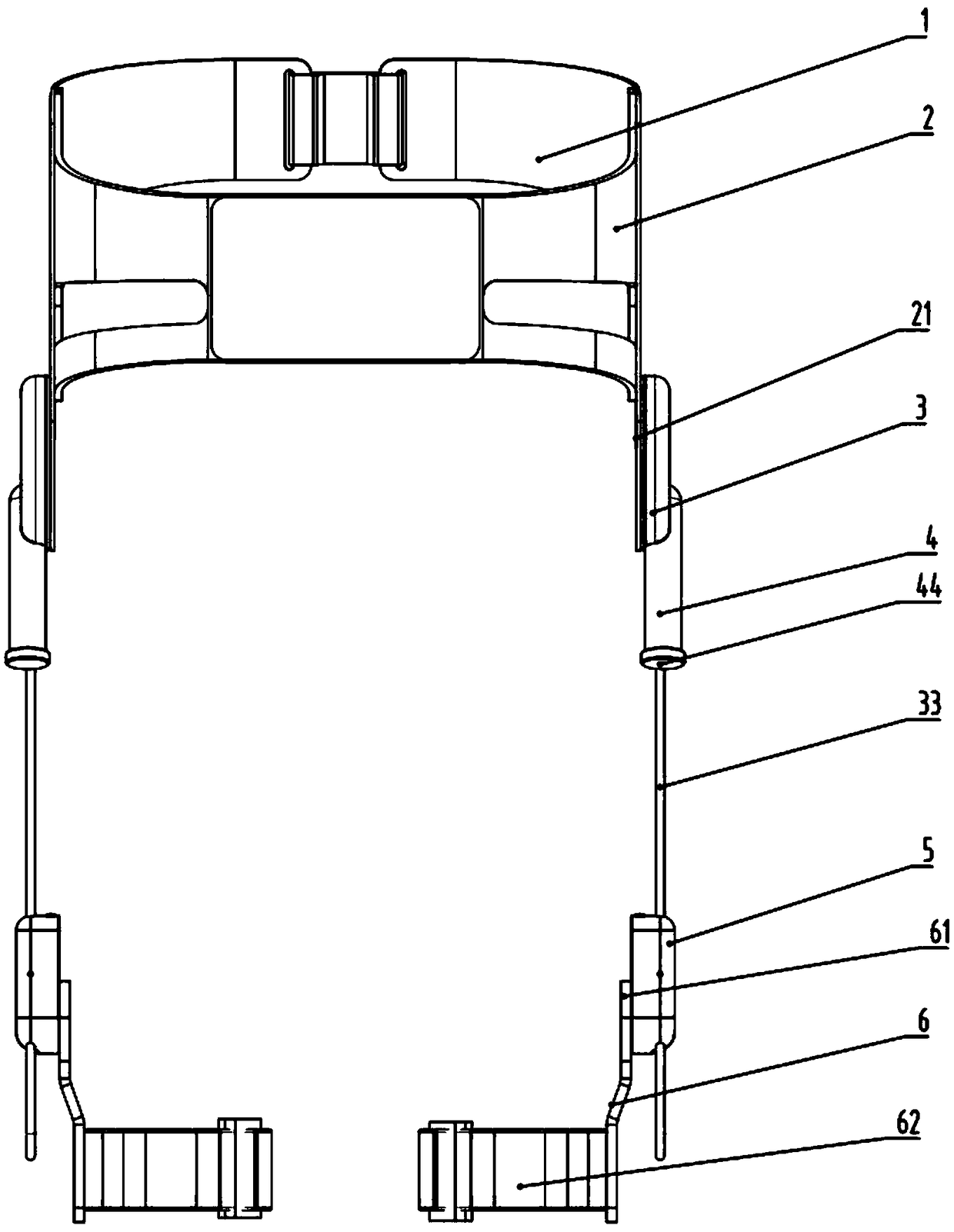
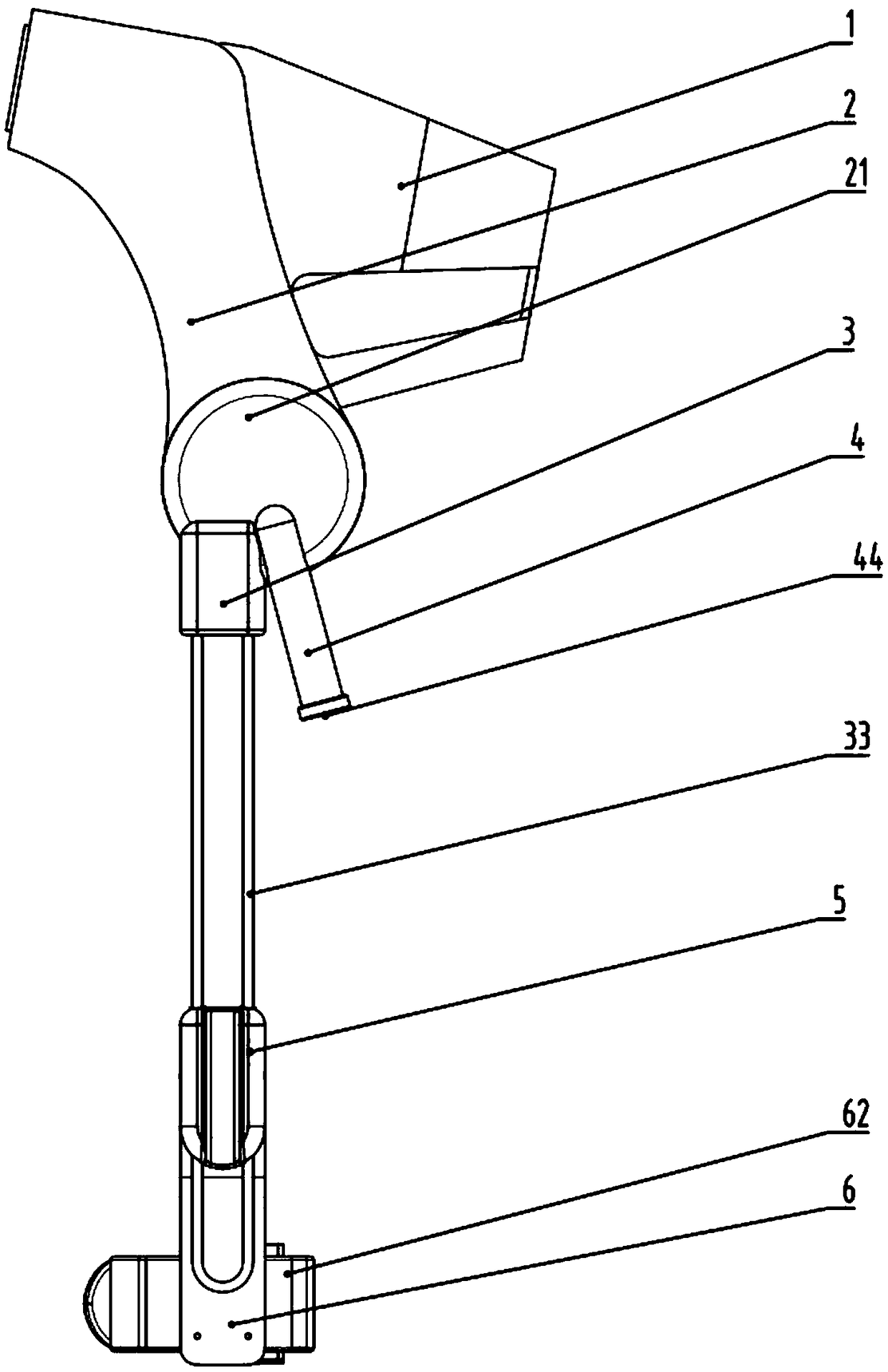
[0027] The lower limb-assisted exoskeleton robot described in the present invention can be used with one leg or symmetrically with both legs. In this embodiment, as Figure 1-5 As shown, both legs are used symmetrically, and are fastened together by their respective waist straps 1 and corresponding buckles. In this embodiment, the up, down, front, back, left, and right are all described in an upright state after the human body wears the lower limb-assisted exoskeleton robot.
[0028] A lower limb assist exoskeleton robot, such as figure 1 As shown, it includes a waist strap 1, a crotch support plate 2, a thigh 3, a flexible mechanism 4 and a calf 6, and the crotch support plate 2 is a rigid structural plate. The waist strap 1 is fitted and fixedly connected to the upper part of the crotch support plate 2 corresponding to the side of the waist of the human body, the lower part of the crotch support plate 2 extends forward and obliquely downward, and the crotch supports The lo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More