

Mechanical arm anti-collision system and method and storage medium
A robotic arm and arm defense technology, applied in the field of control, can solve the problems of robotic arm obstacle collision, personnel injury, mechanical arm or obstacle damage, etc., and achieve the effects of low cost, improved accuracy, and convenient integration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In the embodiment of the present invention, considering that the dynamic model of the mechanical arm can be expressed as the following formula (1):
[0041]
[0042] where M(q)∈R n×n is the sub-arm mass matrix of the manipulator, is the centrifugal force and Coriolis force matrix, G(q)∈R n is the gravity vector, is the friction force vector, τ is the joint moment of the manipulator, are position, velocity and acceleration, respectively.
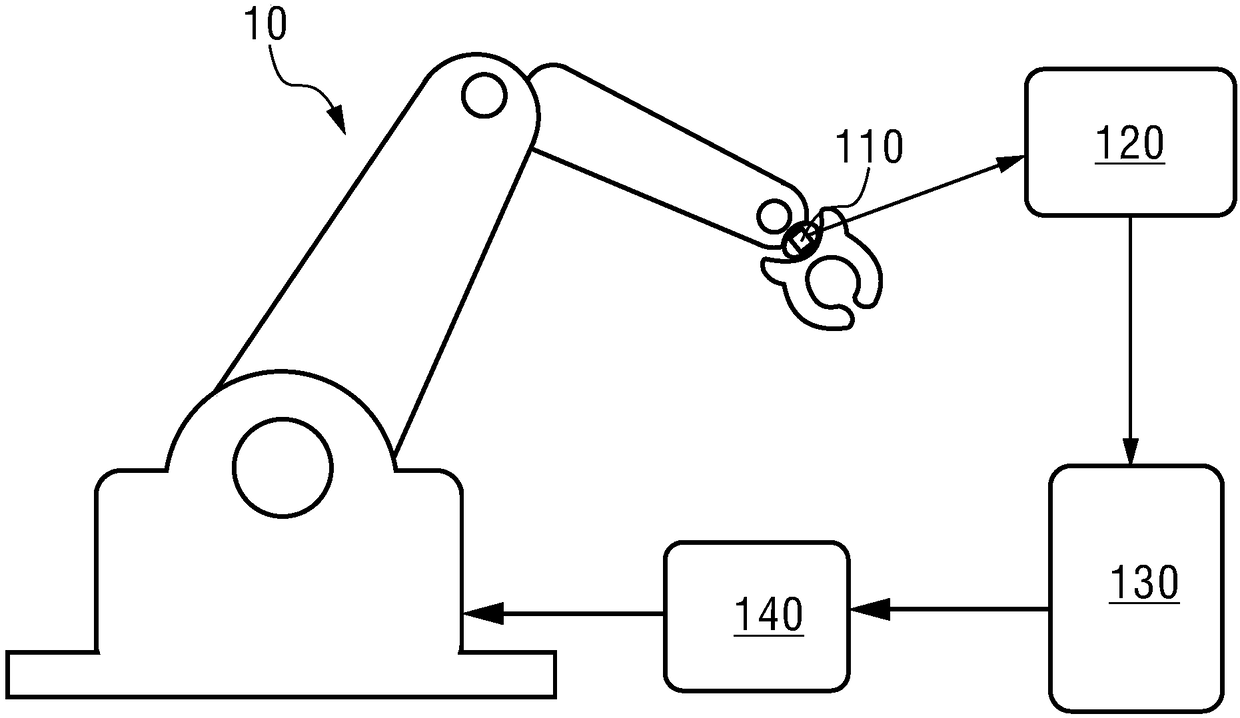
[0043] When the mechanical arm collides with an obstacle, an unknown moment will be applied to the end of the mechanical arm, and the right side of the above formula (1) will become τ+τ ext , correspondingly, the speed and acceleration on the left side of the above formula (1) will change greatly immediately. Therefore, in the embodiment of the present invention, the change of the speed and acceleration can be used to detect whether there is a collision.
[0044] In addition, considering that in practical applications, ther...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More