

Quad-rotor roll angle and pitch angle fault tolerance estimation method based on torque model assistance
A torque model and pitch angle technology, applied in the field of fault-tolerant navigation, integrated navigation and fault-tolerant navigation, can solve the problems of affecting flight safety, performance degradation, inertial sensor accuracy and low reliability, and achieve the effect of ensuring estimation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solutions and beneficial effects of the present invention will be described in detail below in conjunction with the accompanying drawings.
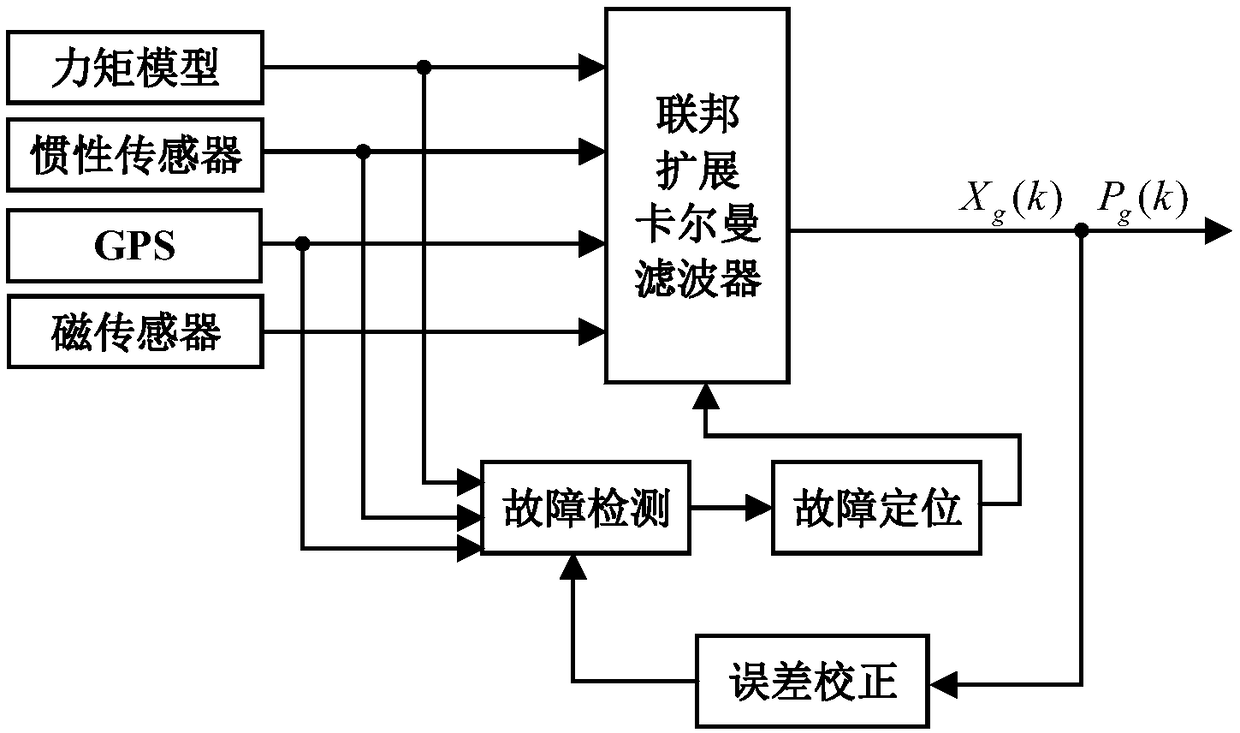
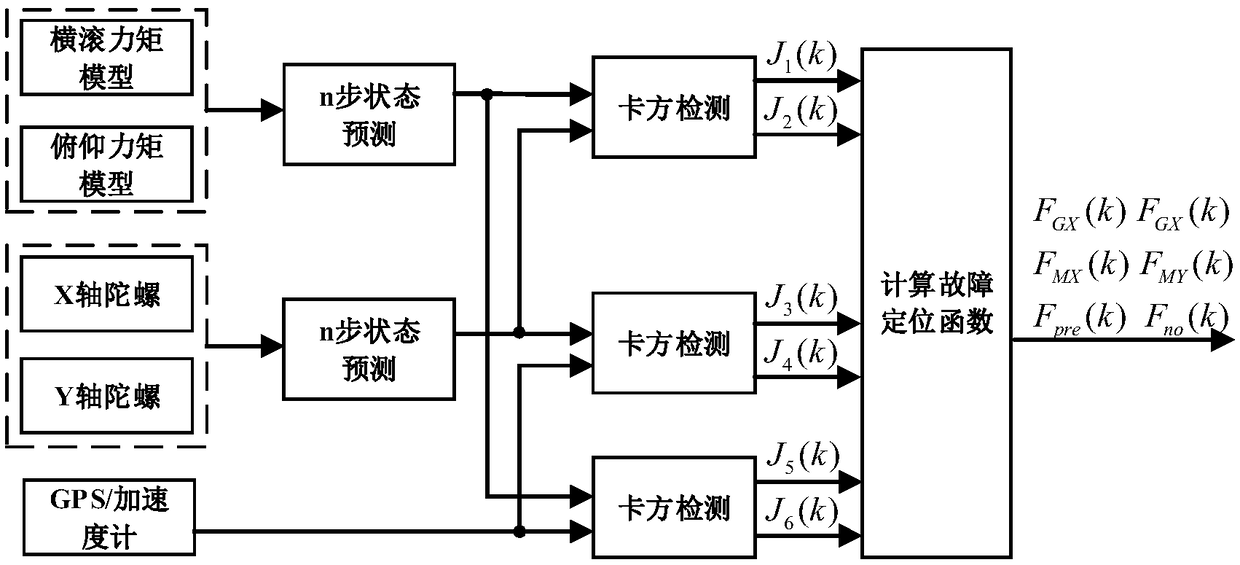
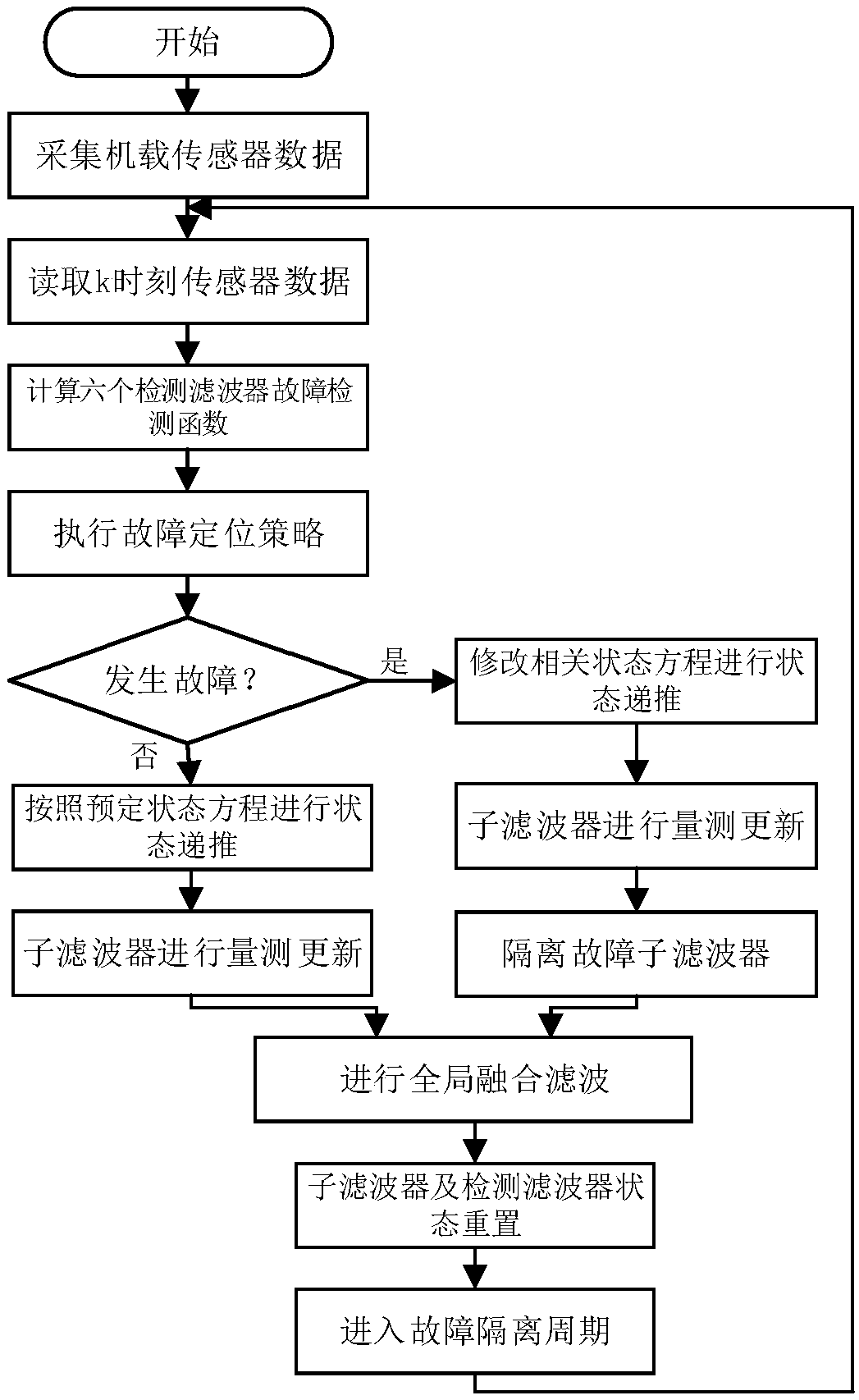
[0029] The filtering process of the inventive method is as figure 1 As shown, the fault detection structure is as figure 2 As shown, it adopts the form of semi-physical simulation. The quadrotor UAV continuously flies three rectangles to collect the experimental data of the airborne sensors, which includes the experimental data of inertial sensors, electronic governor data, GPS data, and magnetic sensor data.
[0030] The present invention provides a four-rotor roll angle and pitch angle error-tolerant estimation method based on the moment model, comprising the following steps:
[0031] Step 1: Periodically read the onboard sensor information of the quadrotor aircraft at time k, including the information of the rotor speed sensor ω 1 (k), ω 2 (k), ω 3 (k), ω 4 (k), which are the rotational speeds of the four rot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More