

UWB (Ultra Wideband) and inertial navigation integrated indoor navigation system
An indoor navigation and fusion positioning technology, applied in the field of indoor navigation, can solve the problems of global positioning failure and kidnapping robots, etc., and achieve the effect of solving global positioning failure and kidnapping robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
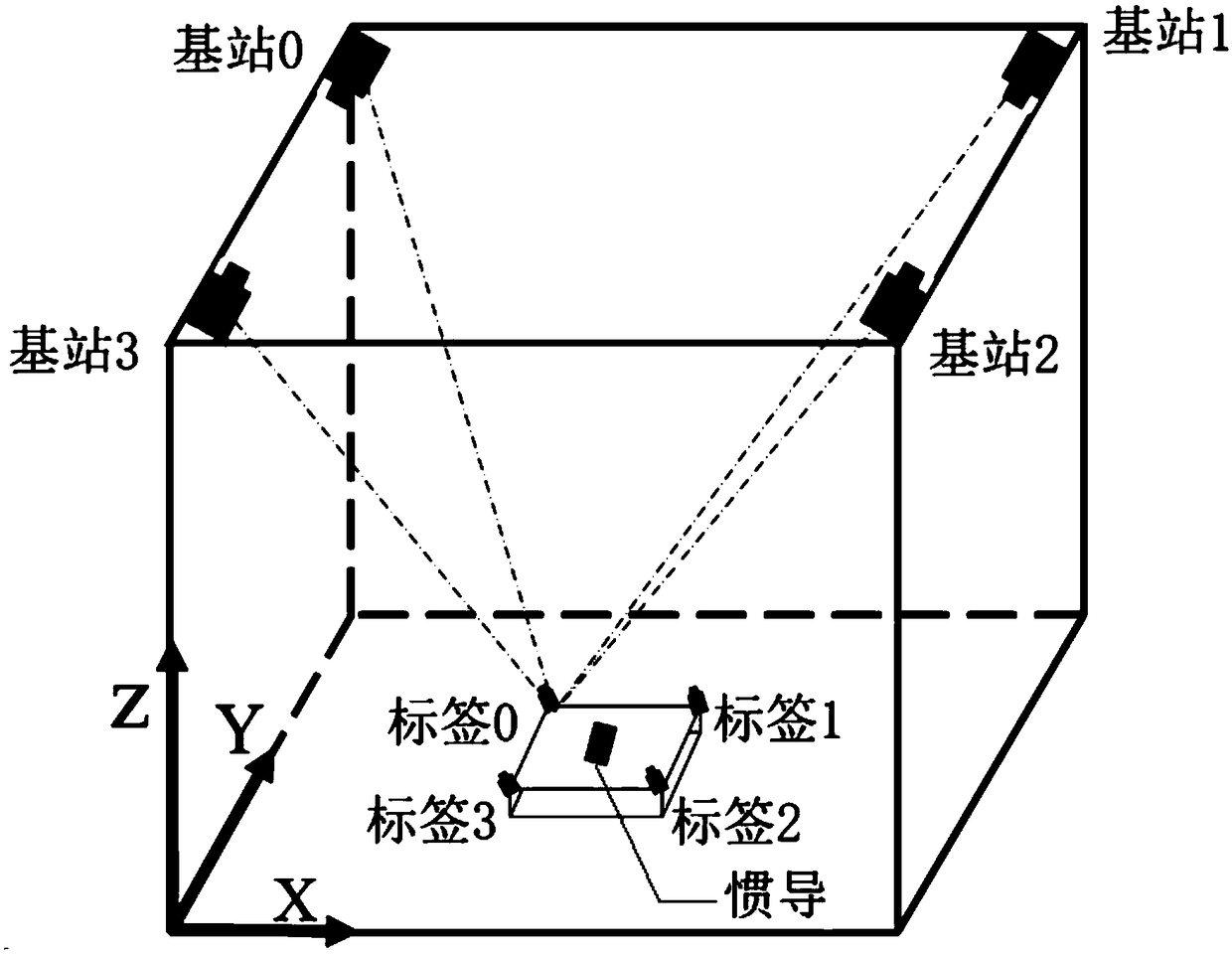
[0011] Specific implementation mode one: the following combination figure 1 Describe this embodiment, the indoor navigation system of UWB and inertial navigation fusion described in this embodiment, set four UWB tags, inertial navigation and laser radar on the mobile robot, and arrange four UWB base stations in the operating environment of the mobile robot; The geometric constraint relationship between the UWB base station, UWB tag and mobile robot is used to obtain the pose of the mobile robot; the extended Kalman filter is used to fuse the obtained pose of the mobile robot with the pose obtained by the inertial navigation to obtain the global pose of the mobile robot Then replace the global pose with the pose obtained by the odometer in the navigation system, and perform fusion positioning with the lidar data.
[0012] In this embodiment, the extended Kalman filter is used to fuse the UWB tag and the inertial navigation, which can effectively determine the pose of the indoor...
specific Embodiment approach 2
[0015] Specific implementation mode two: the following combination figure 1 This embodiment will be described. This embodiment will further describe Embodiment 1. The inertial navigation system is arranged in the X-axis direction of the mobile robot body, which is the same as the forward direction of the mobile robot.
specific Embodiment approach 3
[0016] Specific implementation mode three: This implementation mode further explains the first implementation mode, and the specific process of obtaining the pose of the mobile robot through the geometric constraint relationship between the UWB base station, the UWB tag and the mobile robot is as follows:
[0017] Step 1. Four UWB base stations send electromagnetic wave information to four UWB tags;
[0018] Step 2. After each UWB tag receives the electromagnetic wave information of the four UWB base stations, the distance between each UWB tag and the four UWB base stations is calculated respectively through the flight time;
[0019] Step 3. According to the constraint relationship between each UWB tag and the distance between the four UWB base stations, an overdetermined equation is established, and the position of each UWB tag is solved by the Gauss-Newton iterative method;
[0020] Step 4. After obtaining the positions of the four UWB tags, an overdetermined equation is est...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More