

A method for fluid-guided rigid body control based on deep reinforcement learning
A reinforcement learning and rigid body technology, applied in the fields of computer graphics fluid simulation, reinforcement learning, and optimal control, it can solve problems such as inability to be physically and accurately compatible with fluid simulators, inability to control dynamic rigid bodies, and difficulty in completing control tasks.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
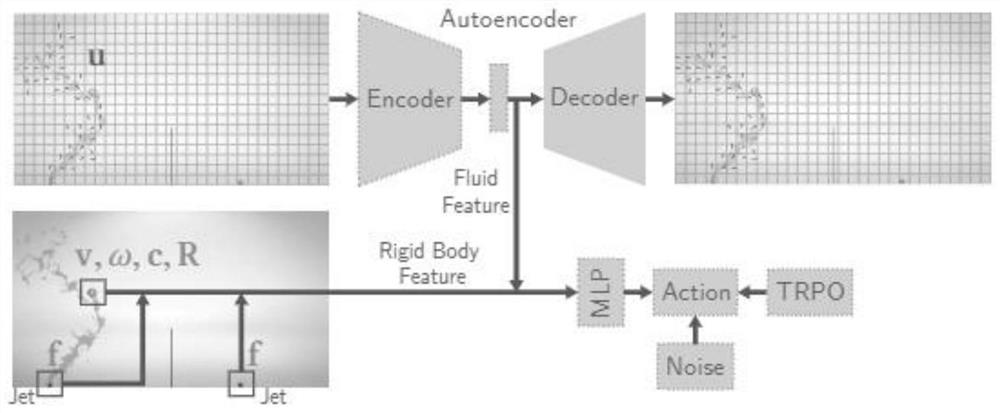
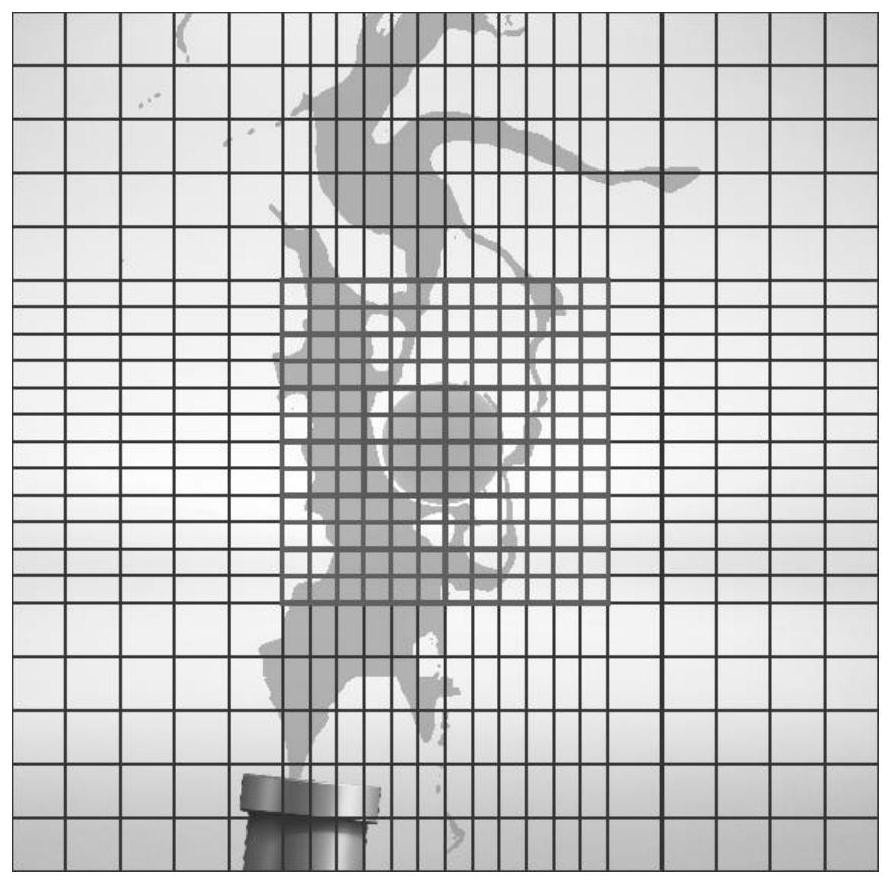
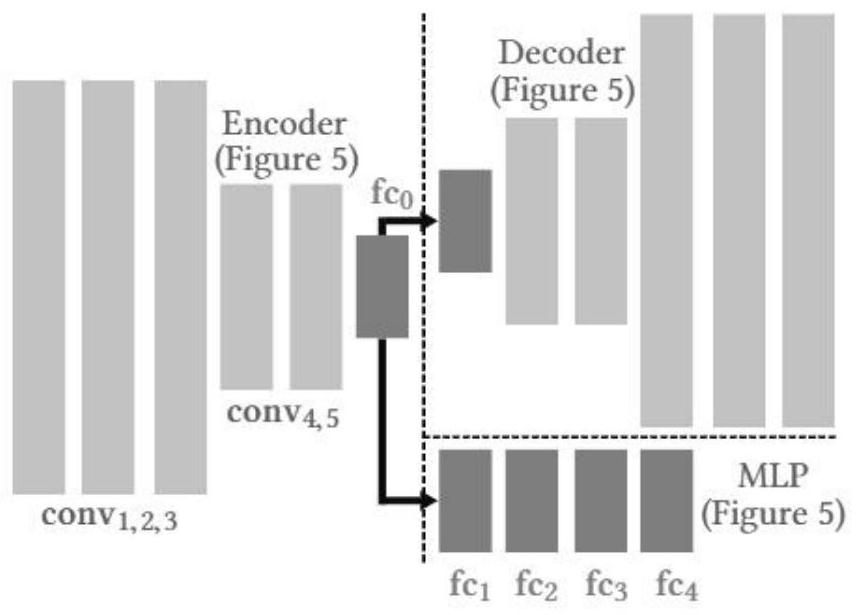
[0043] In this embodiment, the scene where 2-dimensional fluid and solid coexist is used, and the fluid nozzle is controlled to add fluid at the boundary according to the deep reinforcement learning algorithm. Finally, the effect of balancing the solid in the center of the screen is achieved through a control method based on physical laws. This scene produces lively and interesting animation effects. The overall implementation framework is as figure 1 As shown, firstly, the rigid body features are extracted from the state of the physical simulator and the encoded fluid features after dimensionality reduction are input into the strategy MLP network to output control actions, which are supplied to the simulator to execute actions and generate the next state. Among them, the TRPO algorithm is used to optimize the policy network, and the network structure is as follows: image 3 shown. In this embodiment, the scene and key parameters such as Figure 4 as shown, Figure 5-Figur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More