

Attitude angle calculating and positioning method and fusion sensor thereof
An attitude angle and sensor technology, applied in the field of integrated navigation, can solve the problems of decreased navigation accuracy, GPS navigation limitation, high computational complexity, etc., and achieve the effect of improving stability and reliability, improving accuracy and stability, and accurate position information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Hereinafter, the present invention will be further described in detail through specific embodiments in conjunction with the drawings.
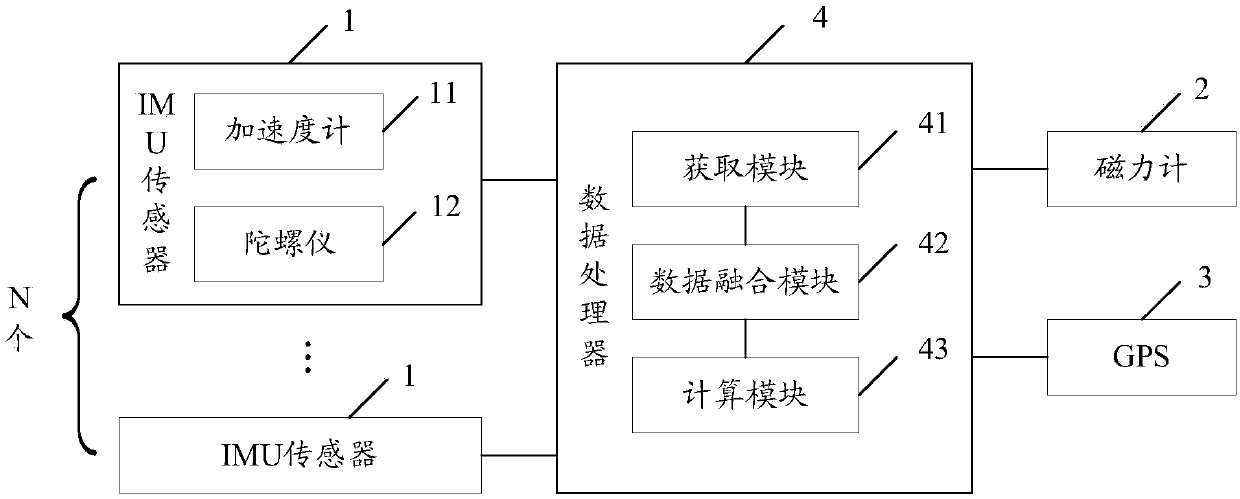
[0031] In the embodiment of the present invention, multiple redundant (at least two) IMU sensors are used to measure the acceleration and angular velocity of the carrier, and the redundant information fusion algorithm is used to perform data fusion on the measurement data of each accelerometer and each gyroscope to obtain the fusion Then use the magnetometer as an aid, use the extended Kalman filter algorithm to fuse the acceleration information, the angular velocity information and the magnetic field information measured by the magnetometer to obtain the fused attitude angle; then use the fused attitude angle The position information measured by the assisted GPS is calculated using the extended Kalman filter algorithm to obtain the position information.
[0032] The embodiment of the present invention provides a fusion sensor for attitude a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More