

Line drive flexible exoskeleton rehabilitation mechanical hand
An exoskeleton and wire-driven technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of high pressure on the patient's hands, large volume and weight, poor adaptability of rigid structures, etc., and achieve light structure, good bionic effect, Simple operation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the following embodiments are combined with the accompanying drawings to illustrate the present invention in detail.
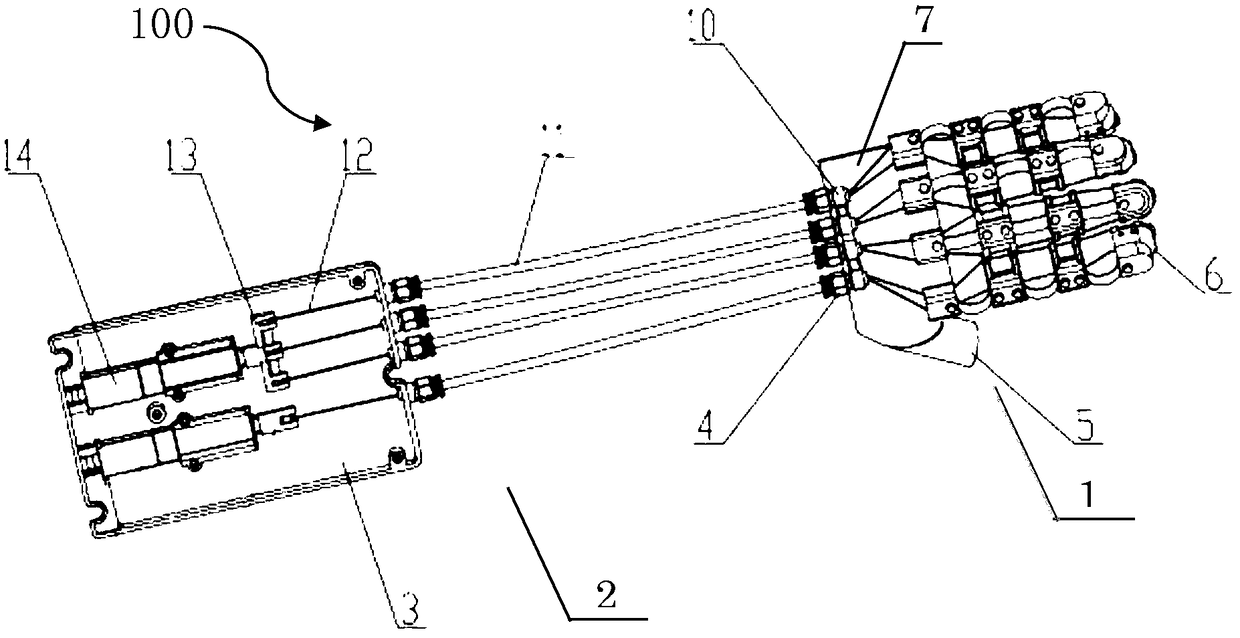
[0023] figure 1 It is a structural schematic diagram of a line-driven flexible exoskeleton rehabilitation manipulator in an embodiment of the present invention.
[0024] Such as figure 1 As shown, the wire-driven flexible exoskeleton rehabilitation manipulator 100 in this embodiment is used to wear on the user's hand to make the user's fingers bend and stretch, and includes a hand unit 1, four connecting tubes 11, four The traction line 12 and the drive unit 2. figure 1 This is explained using the left hand as an example.
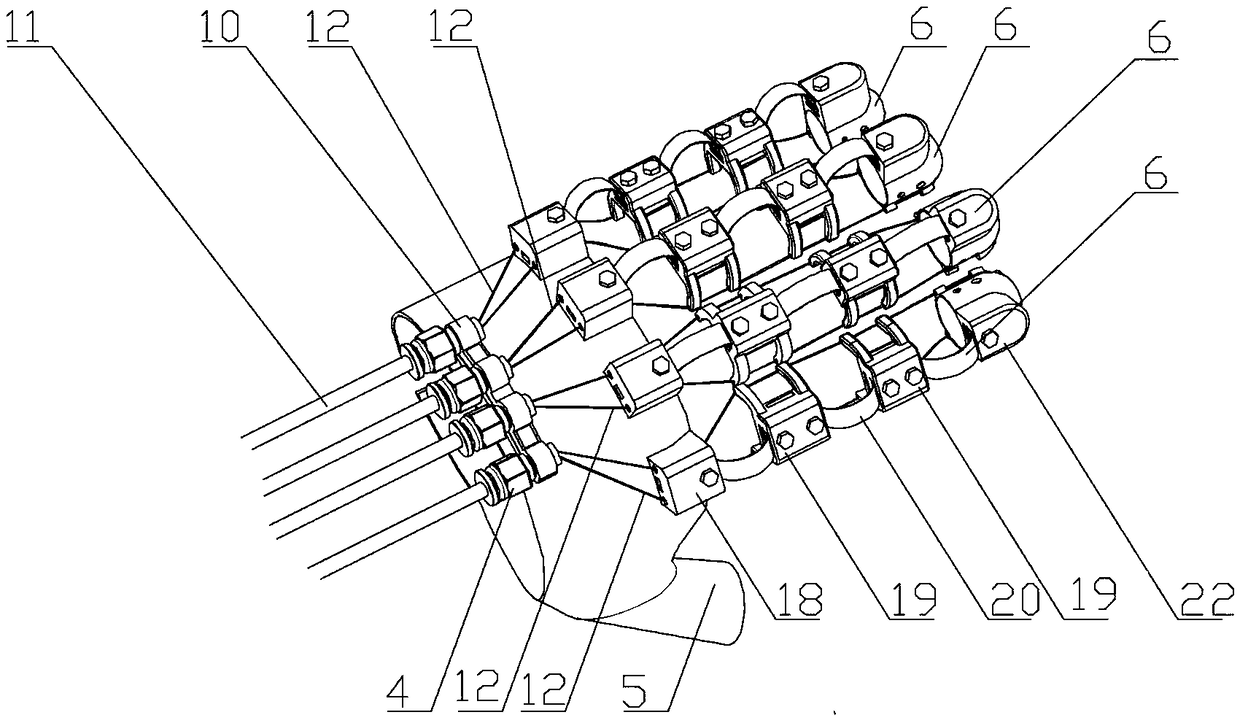
[0025] figure 2 It is a structural schematic diagram of the hand unit in the embodiment of the present invention.
[0026] Such as figure 2 As shown, the hand unit 1 includes a palm cover 7, four fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More