

Mechanical hand for edible mushroom box transportation
A technology of manipulator and bacteria box, applied in the field of manipulator, can solve the problems of complex structure of manipulator, reduced income, and reduced degree of mechanization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
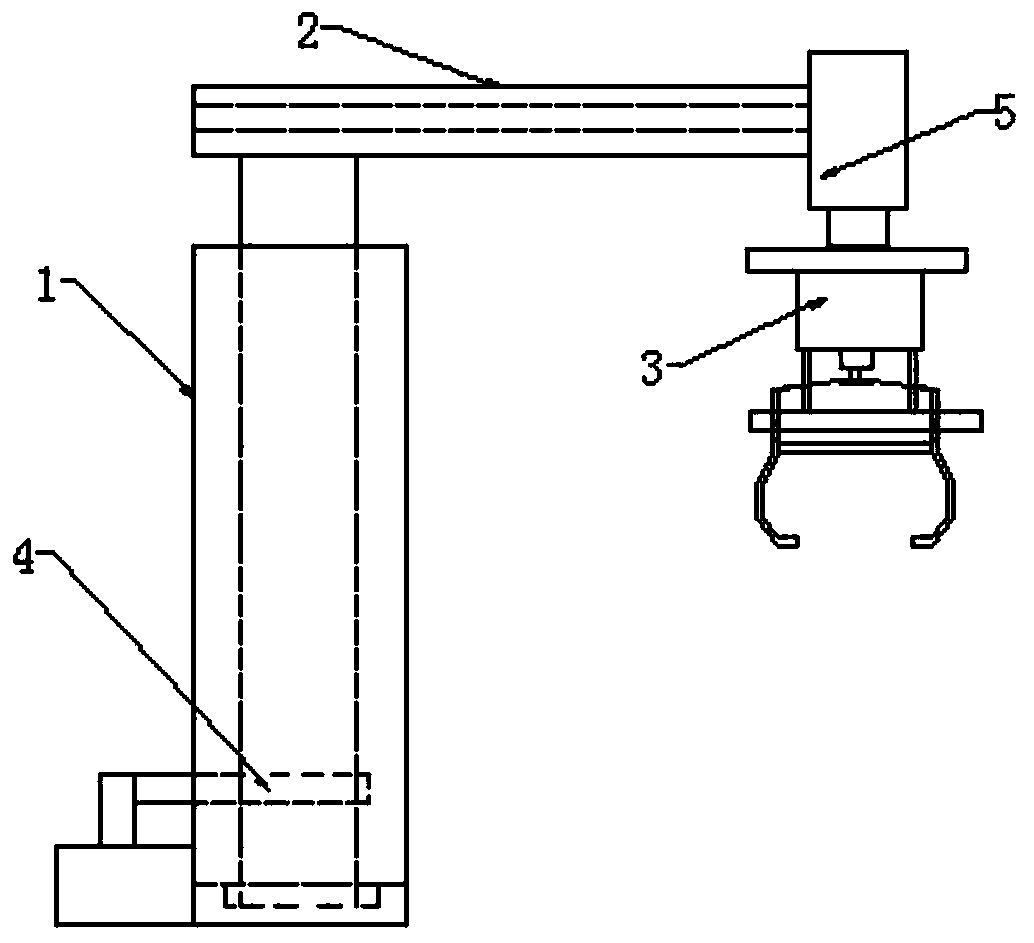
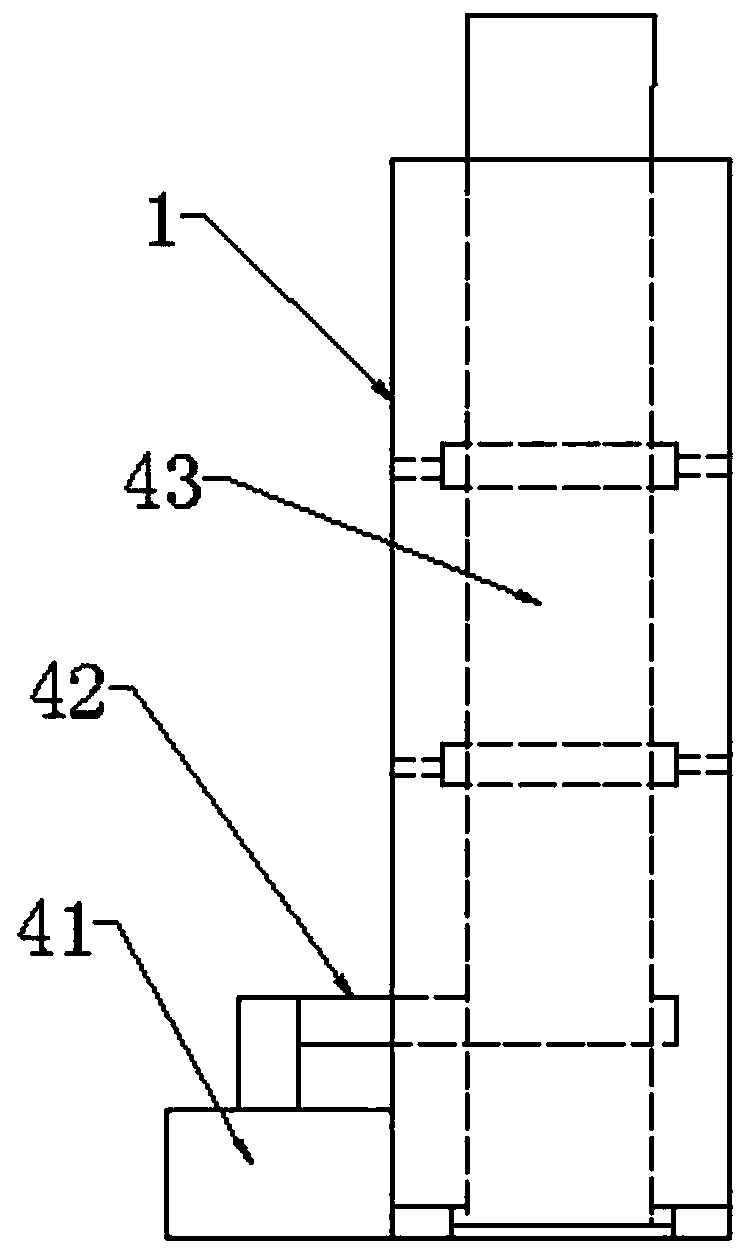
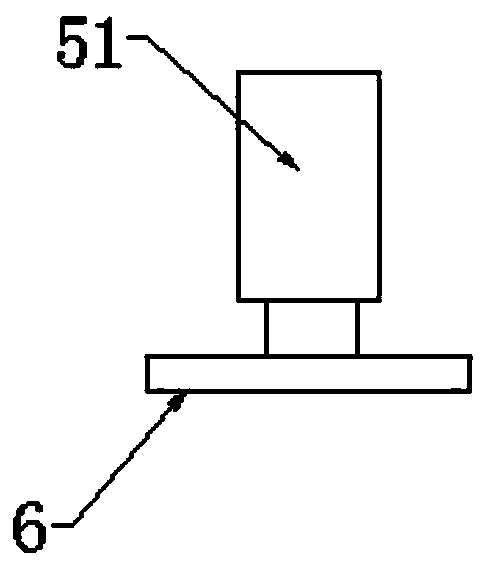
[0027] Such as Figure 1-6 Shown: this embodiment is a kind of manipulator used for the transportation of edible fungus boxes, including a fixed stand 1, a mechanical arm 2 and a mechanical claw 3, the inside of the fixed stand 1 is provided with a rotating mechanism 4, and the lower part of the fixed stand 1 The side is provided with a through hole, the mechanical arm 2 is arranged on the top of the fixed stand 1, one end of the mechanical arm 2 is connected to the fixed stand 1 through the rotating mechanism 4, and the mechanical arm 2 is rotated in a plane through the rotating mechanism 4, and the mechanical arm 2 The lifting drive mechanism 5 is set at the execution end of the lifting drive mechanism 5, the execution end of the lifting drive mechanism 5 is vertically downward, the mechanical claw 3 is fixedly connected with the execution end of the lifting drive mechanism 5, and the mechanical claw 3 is driven by the lifting drive mechanism 5 to move up and down in a straig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More