

Adaptive AGV robot and adaptive navigation method
A robotic and self-adaptive technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as difficulty in later changes and adjustments, increased self-weight, and difficulty in increasing the maximum load of the manipulator
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
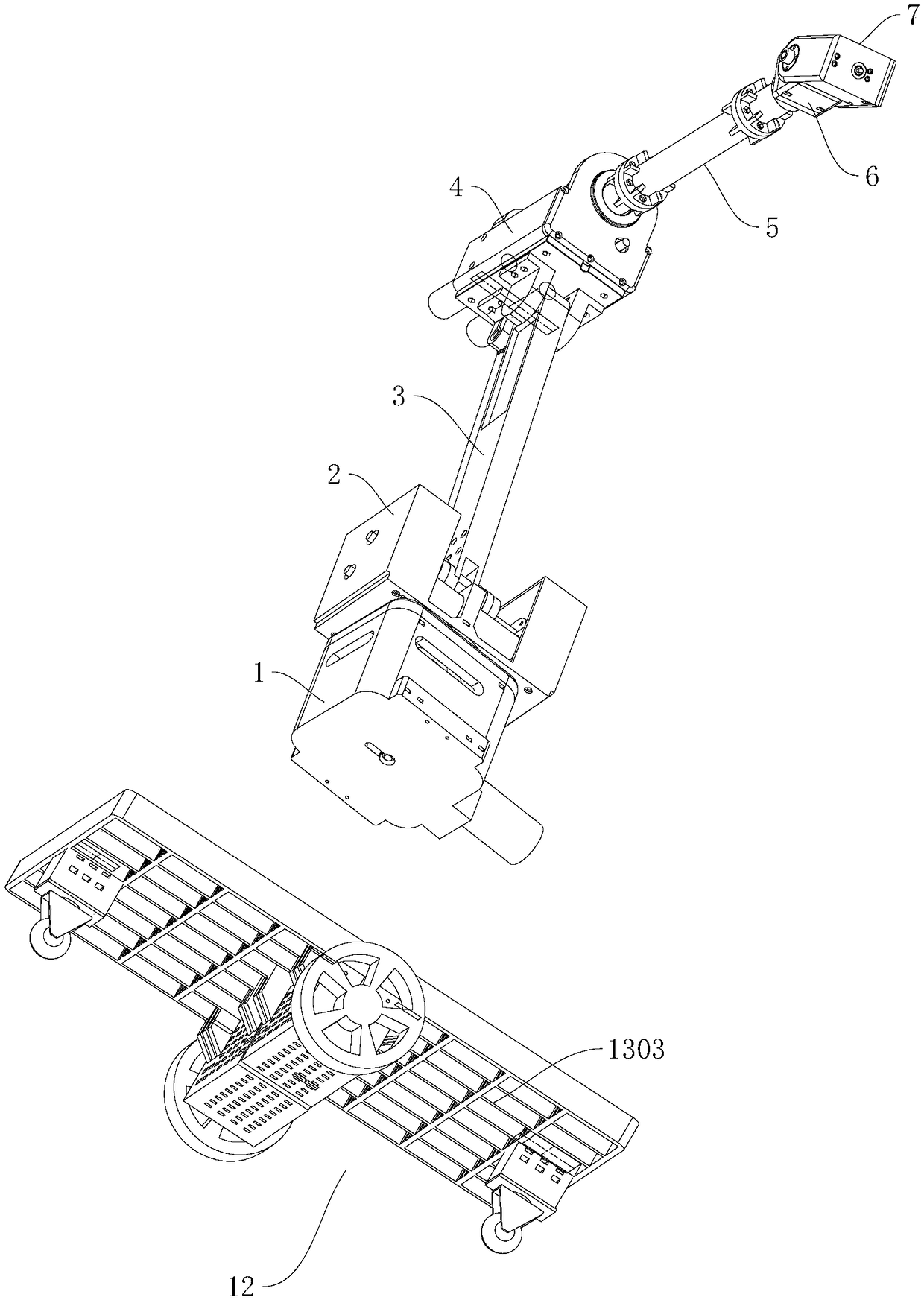
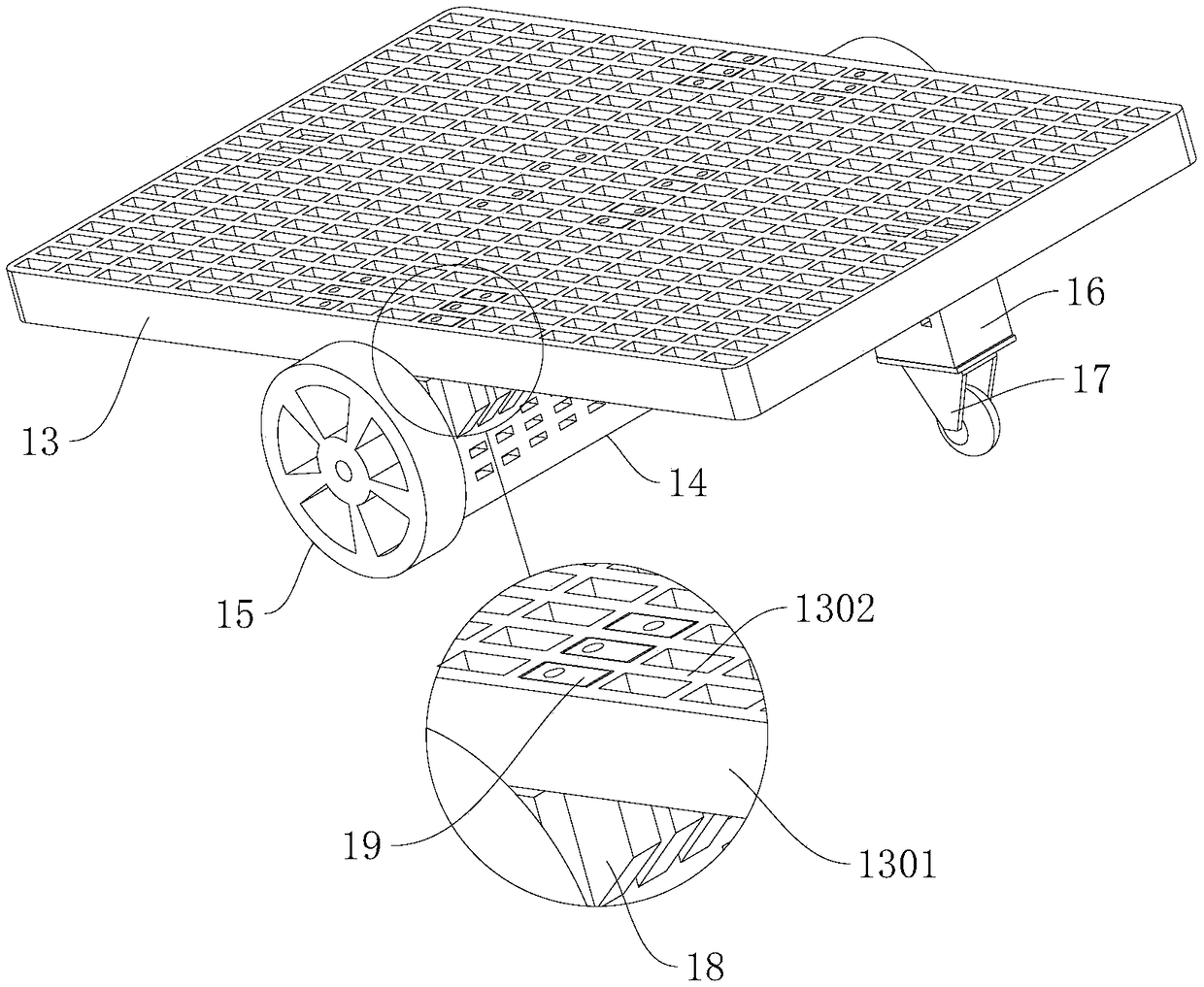
[0083] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 As shown, this embodiment discloses an adaptive AGV robot, which includes a car body, a navigation device arranged on the car body, and an execution device arranged on the car body.
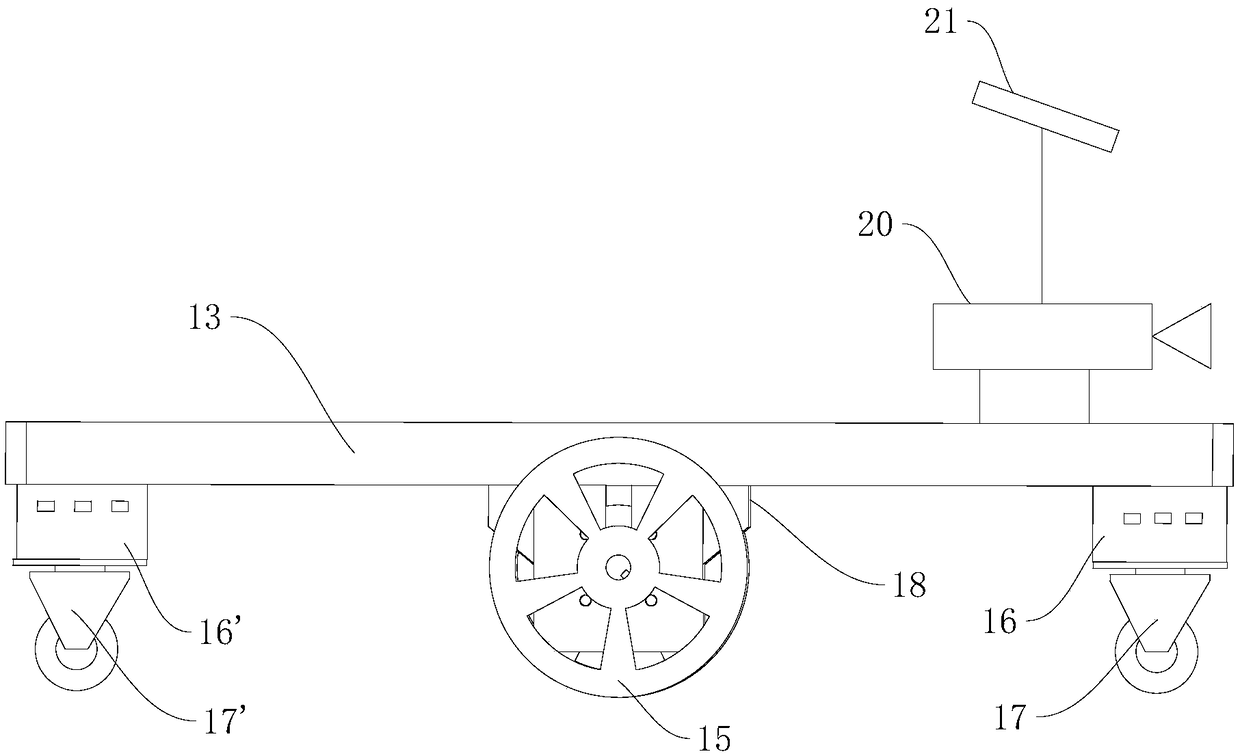
[0084] Specifically, the navigation device includes a processor, a detection radar 21, a detection camera 20, a first filter and a second filter, and the detection radar, the detection camera, the first filter and the second filter are respectively connected with the processor connected.
[0085] In this embodiment, the detection radar is a laser detection radar, the first filter is a laser radar filter; the detection camera is a depth camera, and the second filter is a depth camera point cloud filter.
[0086] The laser radar is installed and fixed according to a certain downward inclination, so that it can detect obstacles in a certain height range; the installation position of the depth camera is facing the front of th...
Embodiment 2
[0115] This embodiment discloses a method for adaptively navigating the robot disclosed in Embodiment 1, which mainly includes pathfinding steps during operation and processing steps after collision:
[0116] Pathfinding steps:
[0117] S01: Use the depth camera to perform scene recognition and data acquisition outside the range of 0.5 meters to form point cloud data; filter the point cloud according to the normal vector direction, and exclude all points whose normal vector direction is within 10 degrees from the Z-axis direction; The remaining points are sent to the obstacle map the robot is traveling on. In this way, all horizontal surfaces can be filtered out, leaving only real obstacle points; if there is a low slope ahead, since the normal vector of the slope is still within 10 degrees of the Z-axis direction, the points on the slope will still be filtered out, and will not be considered a hindrance.
[0118] S02: Use laser radar to scan and detect within 0.5 meters to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More