

A vibration prediction method of manipulator based on GA-ELM
A prediction method, manipulator technology, applied in gene models, genetic rules, computer-aided design, etc., can solve the problems of manipulator position control or force control accuracy reduction, affecting the service life of the structure, stimulating system resonance, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0019] Embodiment 1: a kind of manipulator vibration prediction method based on GA-ELM, this method comprises the following steps:
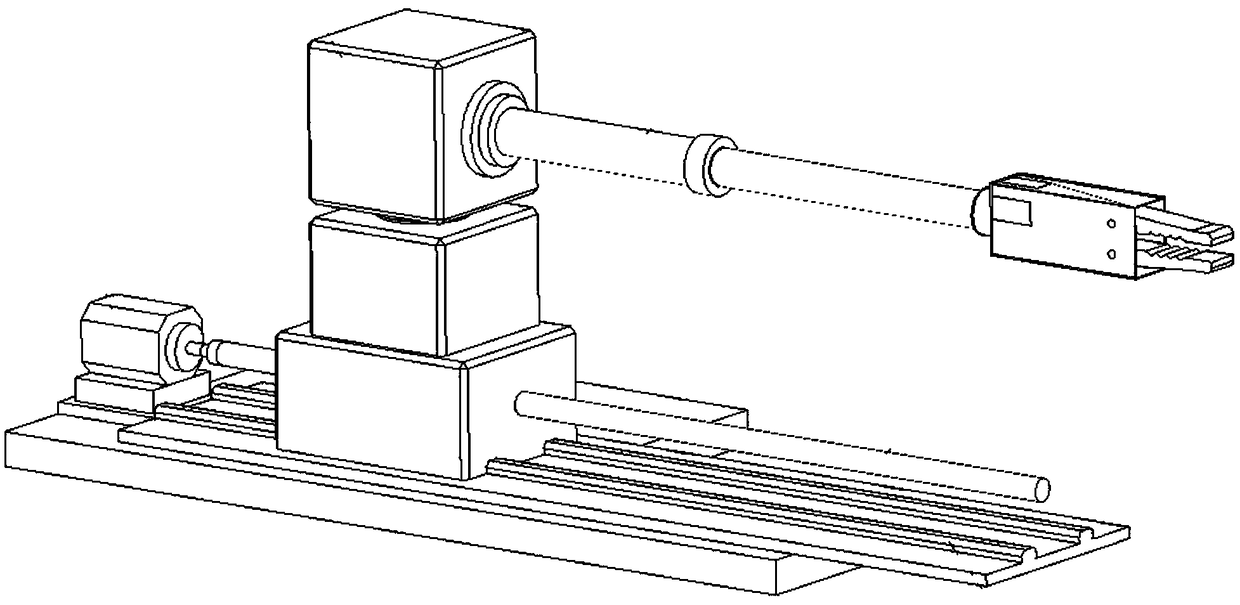
[0020] (1) The structure of the die-casting mold pick-up manipulator is relatively complicated, so the manipulator is reasonably simplified during modeling. On the one hand, it is convenient for analysis and calculation during simulation, and on the other hand, it is necessary to ensure that the main structural mechanical properties of the original analysis object do not occur. Big change. Through the top-down design method, UG is used to establish a parametric driven model for the die-casting mold pick-up manipulator;
[0021] (2) Import the 3D model of the manipulator into the ANSYS finite element software, such as figure 1 The three-dimensional model shown, uses the transient dynamic characteristic module in the ANSYS finite element software for transient analysis, and performs multiple analyzes by setting different workpiece gravity, inertia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More