

3D object modeling method based on depth sensor
A technology of depth sensor and 3D modeling, applied in the field of object modeling and 3D modeling of objects based on depth sensor, can solve the problems of slow modeling process, insufficient modeling accuracy, not achieving the effect of technicians, etc., to improve The effect of modeling speed, ensuring modeling accuracy, high usage and promotion value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
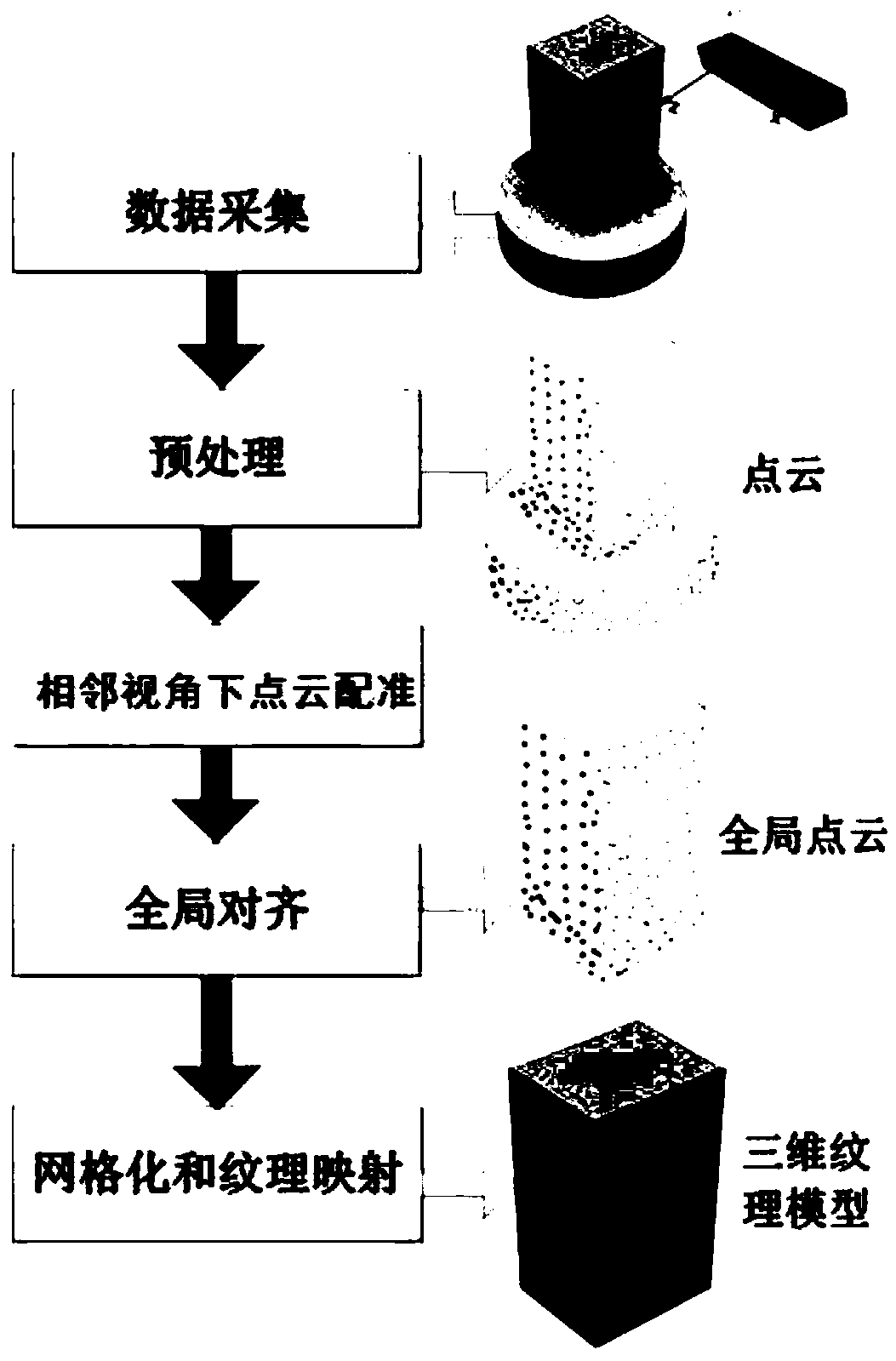
[0041] like Figure 1 ~ Figure 3 As shown, the present invention discloses a method for three-dimensional modeling of an object based on a depth sensor, comprising the following steps:
[0042] S1. The data collection step is to read data from the depth sensor, the data includes depth information and color information, and obtain 3D point cloud data after fusing the depth information and color information.
[0043] The data collection steps described in S1 specifically include:
[0044] S11. The hardware setting sub-step is to fix the depth sensor and the turntable on the platform, place the object on the turntable, and make the depth sensor look down and shoot the object placed on the turntable and rotate at a constant speed.
[0045] S12, data pre-storage sub-step, turn the turntable so that the turntable keeps rotating at a constant speed at a speed of 60S / circle, and take a frame of depth image and a frame of color image from the depth sensor every 2s;
[0046]S13. The d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More