

A platform type crawler and an automatic leveling method
A stair climbing vehicle and platform-type technology, which is applied in the field of crawler stair climbing vehicles and automatic leveling systems, can solve problems such as the inability to maintain the dynamic adjustment of the load-carrying platform, and achieve the effects of simple structure, guaranteed safety, and improved sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
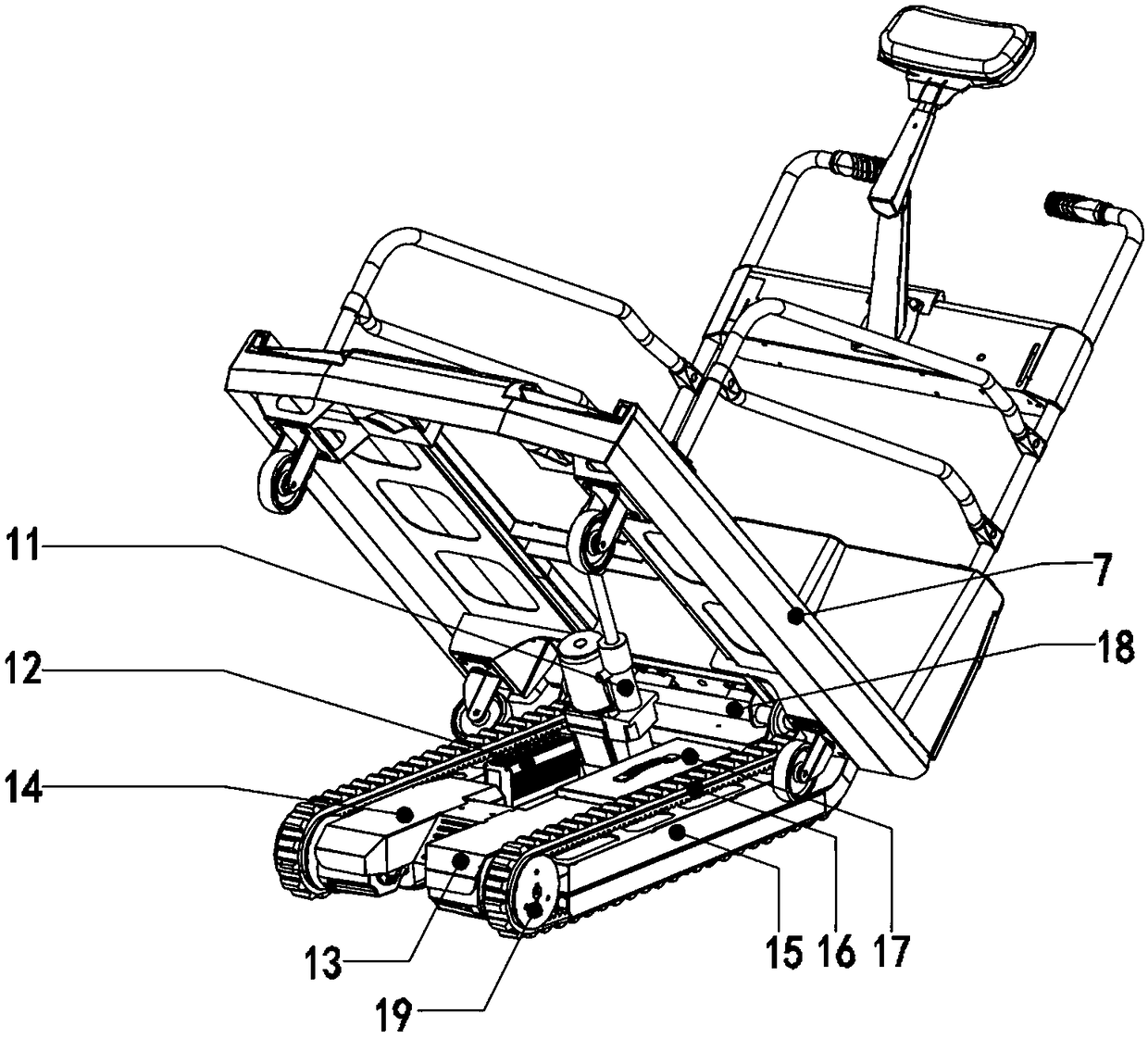
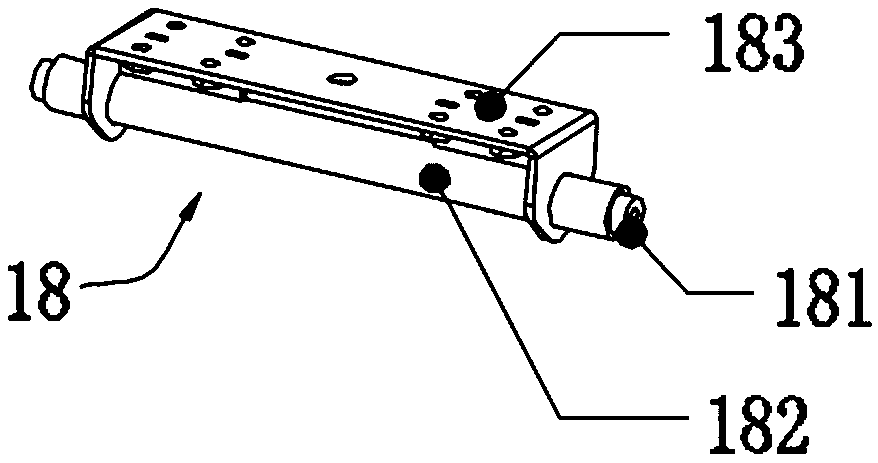
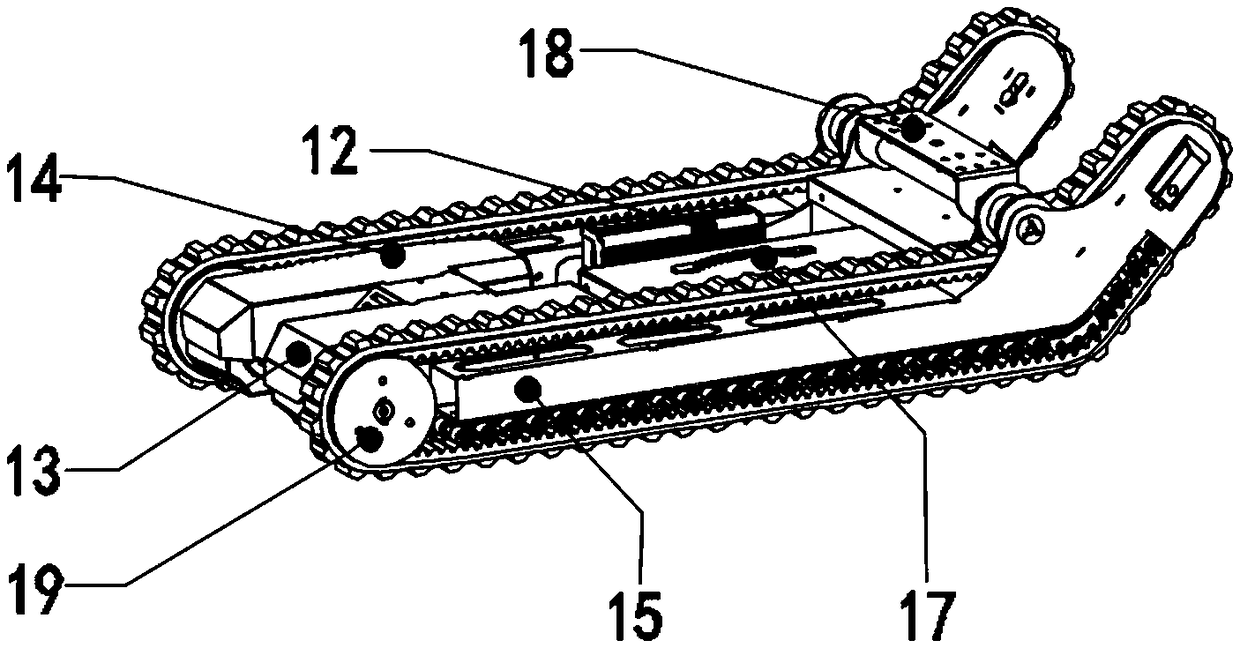
[0038] Such as figure 1 As shown, it is an embodiment of a platform type crawler stair climbing vehicle applied in a stair climbing chair, including a loading platform 7, a push rod 11, and a crawler chassis 15, and the rear end of the platform and the rear end of the crawler chassis are passed through bearings or The rotating casing mechanism 18 is connected, preferably, the two ends of the hydraulic push rod 11 are respectively connected with the lugs on the reinforcing ribs at the bottom of the platform and the lifting lugs on the reinforcing pipe in the middle of the crawler chassis 15; the push rod 11 is an electro-hydraulic push rod, Since the stroke of the piston rod of the electro-hydraulic push rod is continuous, and the expansion and contraction of the piston rod is very stable, no impact force will be generated. When the wheelchair is loaded, the elderly or disabled persons on the wheelchair are more comfortable; the push rod 11 One end is connected to the middle pa...
Embodiment 2
[0049] Such as Figure 4 As shown, it is a specific embodiment of the automatic leveling method when the platform type crawler stair climbing vehicle of the present invention is applied to climbing a building, and the specific automatic leveling includes the following steps:
[0050] Step S101, start the automatic leveling system;
[0051] Step S102, judge whether the platform is in the horizontal position through the high-precision tilt switch, and when the judgment result is not in the horizontal position, the central processing module judges the tilt state of the loading platform according to the data obtained by the three-axis accelerator;
[0052] Step S103, the central processing module automatically controls the movement of the hydraulic push rod according to the tilt state of the platform, so as to adjust the platform to always be in a horizontal position.
[0053] Specifically, the step S103 judges whether the current platform is higher than the horizontal position o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More