

Forklift global path planning method
A global path planning, forklift technology, applied in the direction of comprehensive factory control, comprehensive factory control, program control, etc., can solve the problems of long running time of the algorithm, local optimum, etc., to speed up the convergence speed, reduce the path length, and improve efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
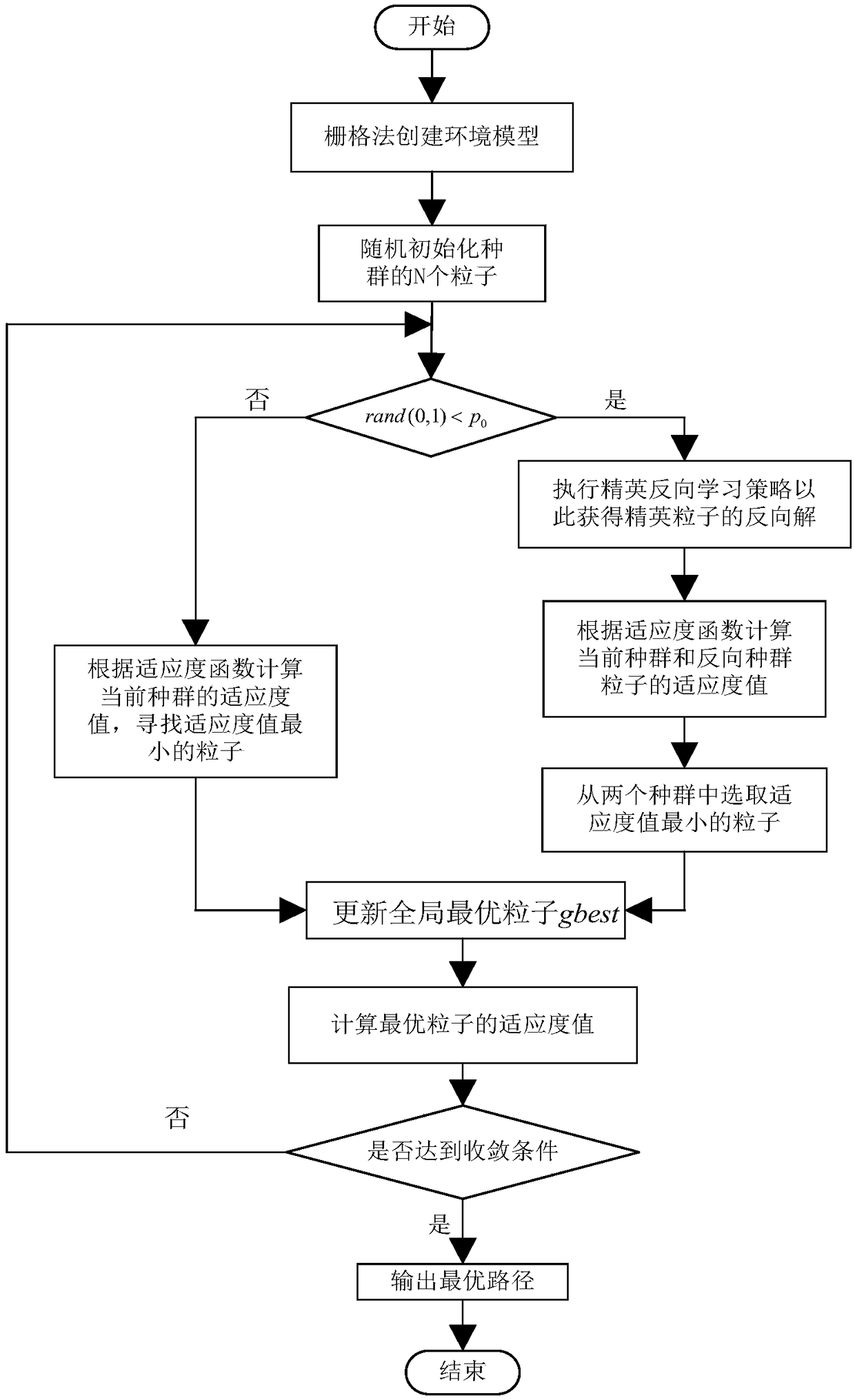
[0045] Such as figure 1 As shown, a forklift global path planning method, the method includes the following sequential steps:
[0046] (1) Establish a map model of the forklift working environment according to the actual working environment of the forklift combined with the grid method;
[0047] (2) Encode the path of the forklift and initialize N particles randomly;
[0048] (3) Establish a fitness function based on the forklift path length combined with the safety and smoothness of the forklift work;
[0049] (4) Generate a random number rand(0,1), judge whether the random number rand(0,1) meets the probability condition of using the elite reverse learning strategy, and update the global optimal particle according to the judgment result;
[0050] (5) Judging whether the convergence condition is met, if the judging result is yes, then output the optimal path, otherwise, return to step (4).
[0051]The step (2) specifically refers to: encoding the path connecting the starti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More