Multi-legged robot based on three-degree-of-freedom mechanical legs
A technology of multi-legged robots and mechanical legs, applied in the field of robotics, can solve problems such as large carrying capacity, limited application range, and poor dynamic characteristics, and achieve good dynamic characteristics, good carrying capacity, and strong obstacle-surpassing ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Exemplary embodiments, features, and performance aspects of the present invention will be described in detail below with reference to the accompanying drawings. The same reference numbers in the figures indicate functionally identical or similar elements. While various aspects of the embodiments are shown in drawings, the drawings are not necessarily drawn to scale unless specifically indicated.
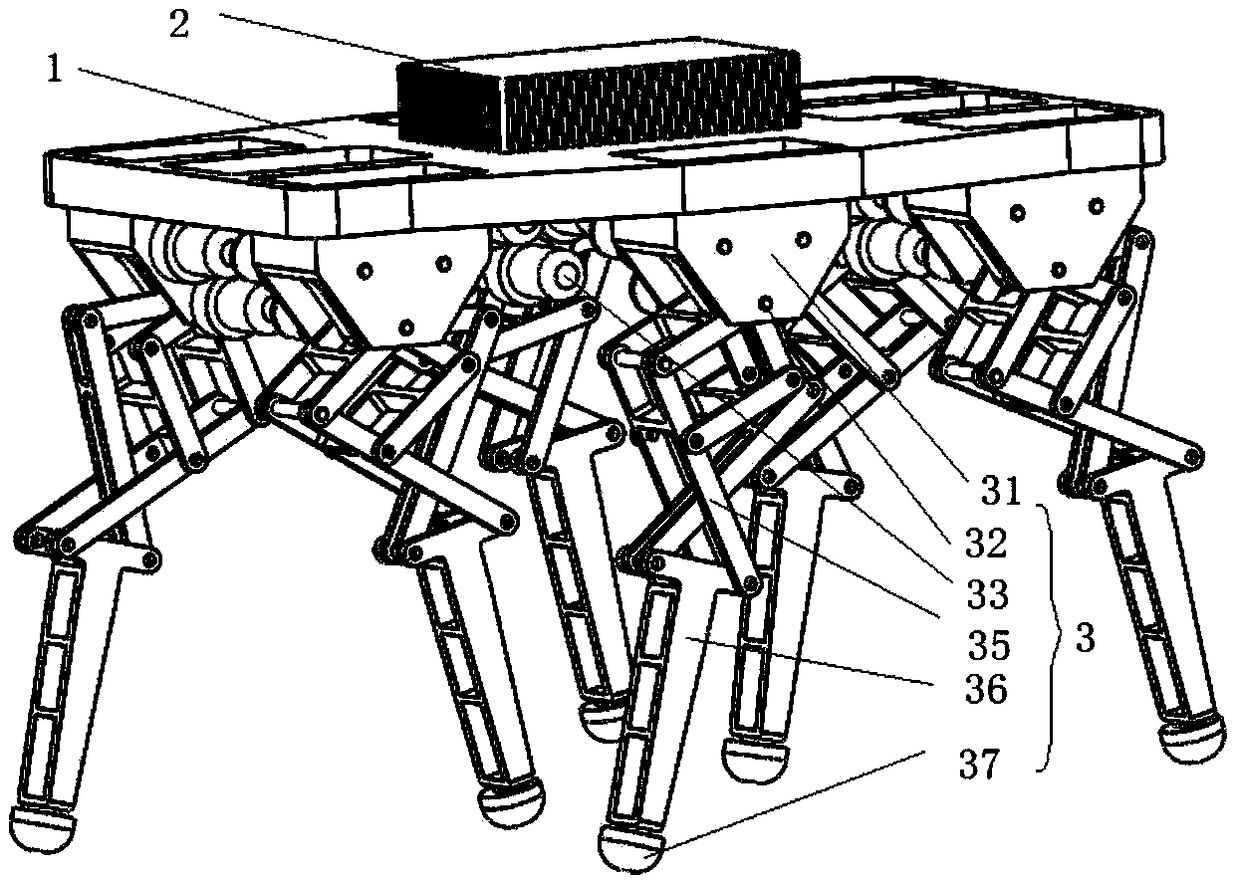
[0020] like figure 1 As shown, a multi-legged robot based on three-degree-of-freedom mechanical legs includes a fuselage 1, an electrical unit 2 and three-degree-of-freedom mechanical legs 3, the electrical unit 2 is fixed on the fuselage 1, and multiple three-degree-of-freedom mechanical legs 3 are evenly distributed on both sides of the fuselage 1;
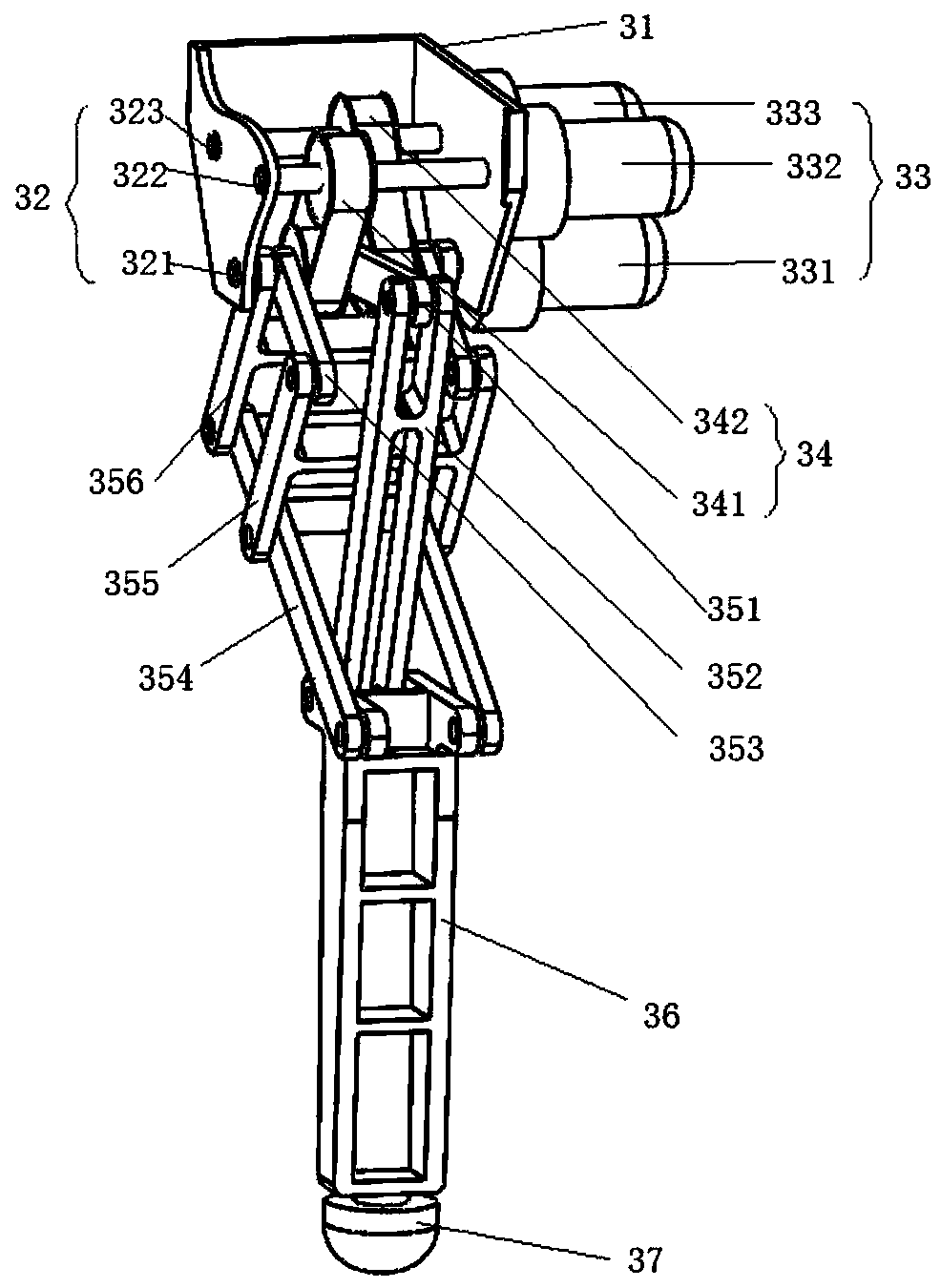
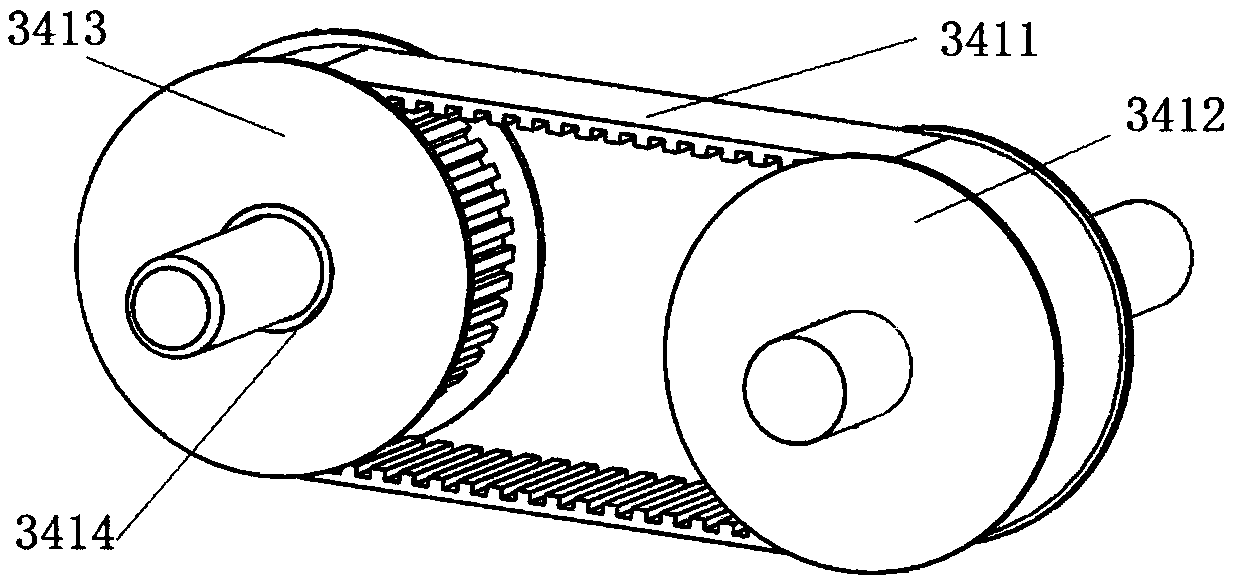
[0021] like figure 2 As shown, the three-degree-of-freedom mechanical leg 3 includes a mechanical leg base 31, a motor reducer assembly 33, a rotating shaft 32, a belt transmission assembly 34, a thigh unit 35, a T-shaped ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More