

Graphical control configuration method of four-rotor unmanned aerial vehicle
A four-rotor UAV, control configuration technology, applied in the direction of non-electric variable control, control/adjustment system, three-dimensional position/channel control, etc., can solve the problem of low efficiency of troubleshooting, unfavorable monitoring and intervention, and difficulty in finding modules and other issues to achieve the effect of reducing the difficulty of development, improving development efficiency, and flexible debugging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
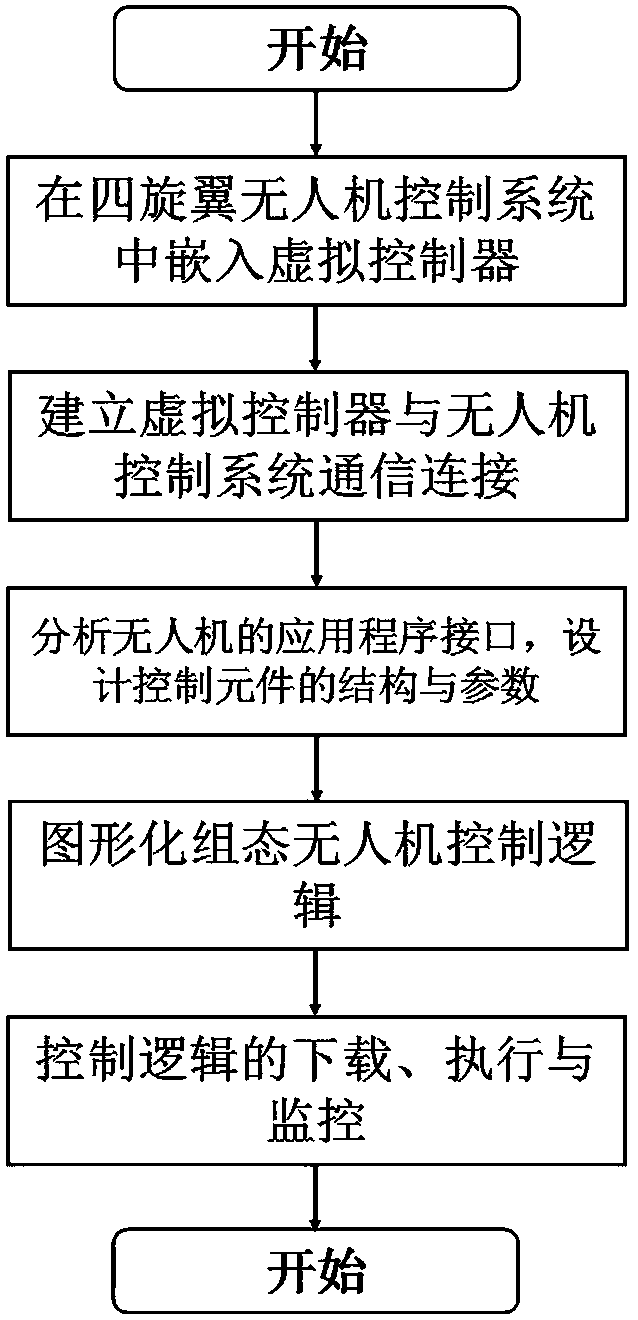
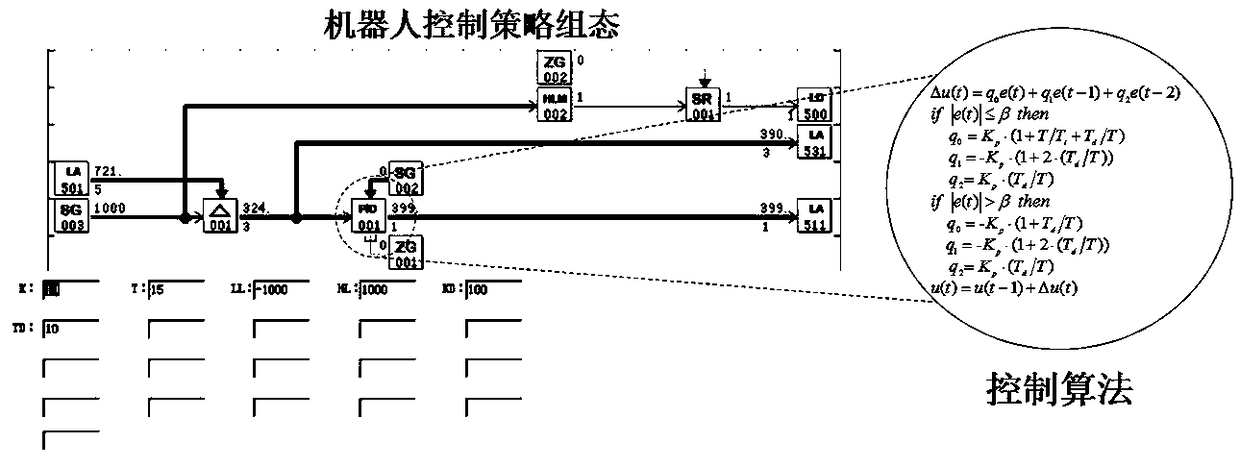
[0025] The invention provides a graphical control configuration method for a quadrotor UAV, which is characterized in that the action characteristics of the quadrotor UAV are divided into sensing characteristics, communication characteristics and driving characteristics, and a corresponding quadrotor UAV is provided. UAV control components are used to read the robot's sensing characteristics, control the communication signal and drive the basic instructions; the control process of the quadrotor UAV can be realized by graphically configuring the components according to the predetermined logic. , and the control process can be monitored and intervened in real time. The specific implementation of this method is as follows:
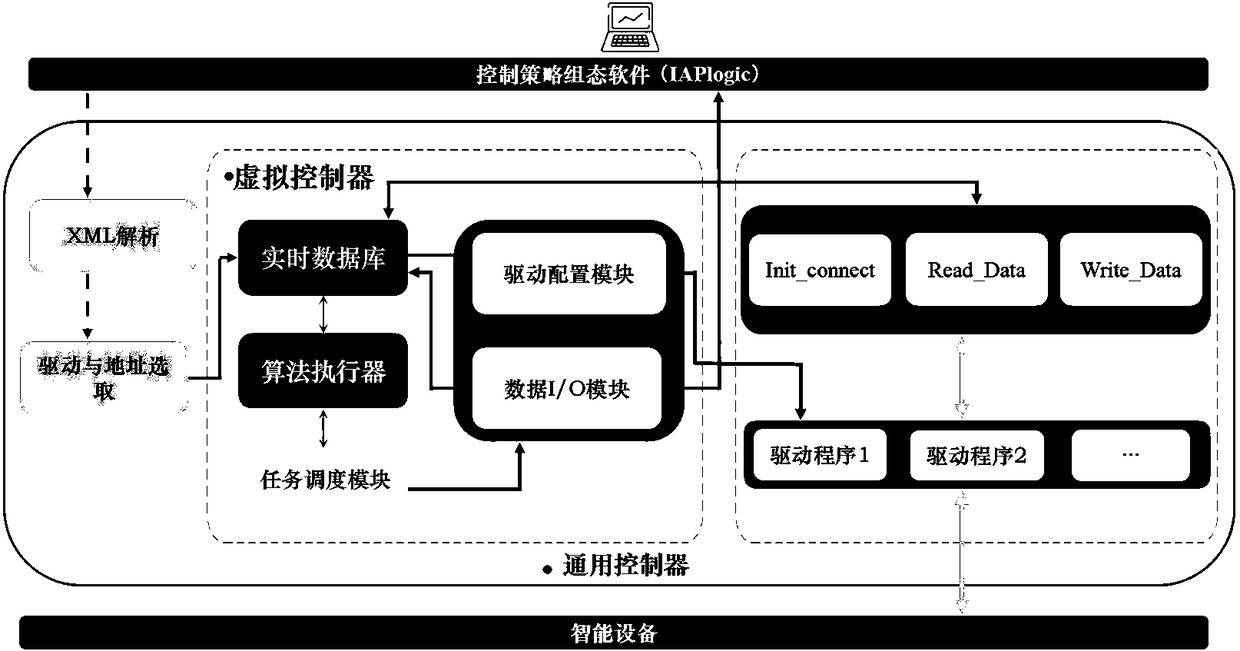
[0026] Step S1, embedding a virtual controller in the quadrotor UAV control system:
[0027] Analyze the structure o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More