Active attitude and all-wheel steering cooperative control method based on coaxial wheel leg structure
A collaborative control, coaxial technology, applied in motor vehicles, extraterrestrial vehicles, transportation and packaging, etc., can solve the problem of in-depth research on estimation methods, and achieve the effect of reducing tension and good control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Below in conjunction with accompanying drawing, the present invention will be further described:
[0054] The present invention is described in detail below in conjunction with accompanying drawing:
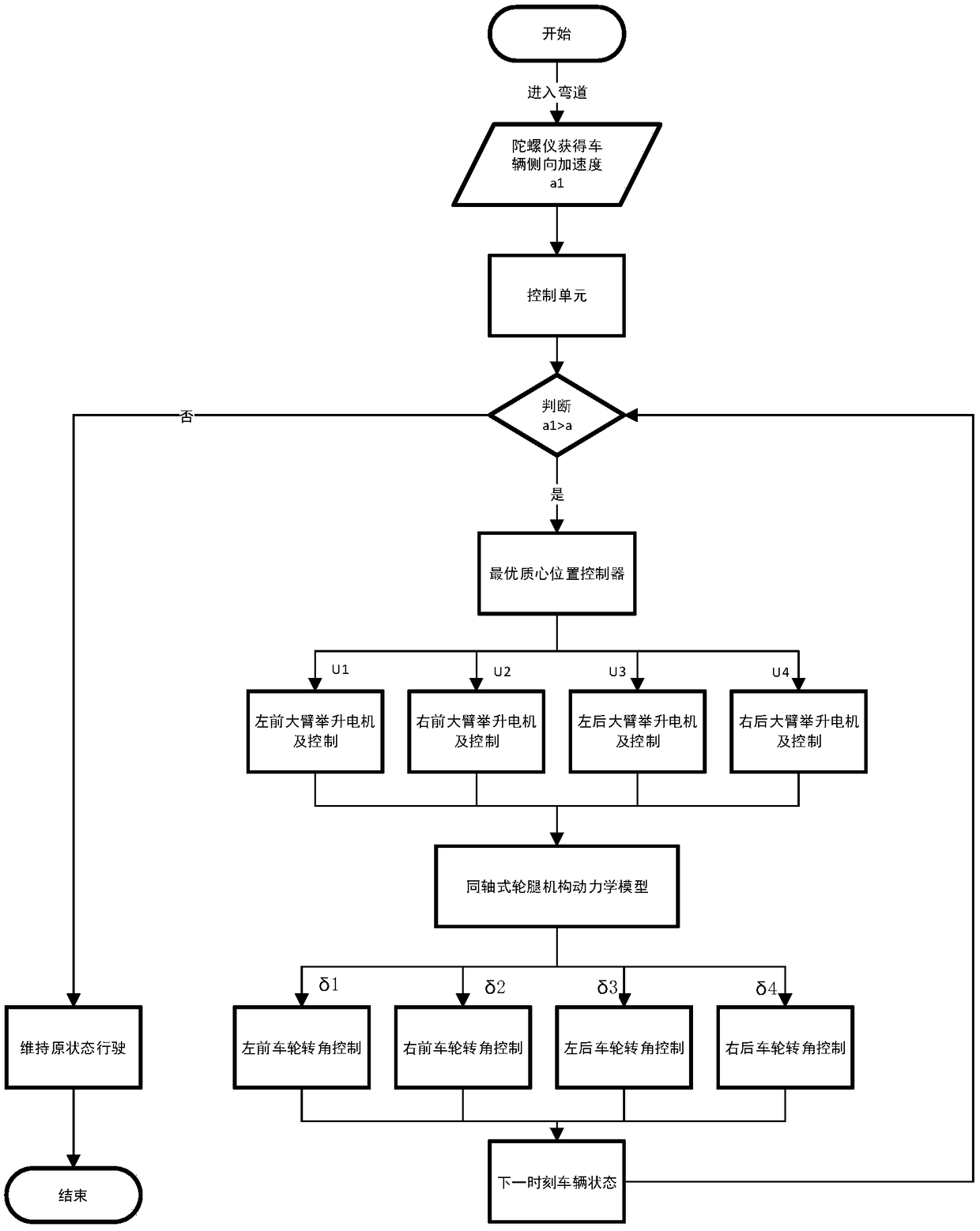
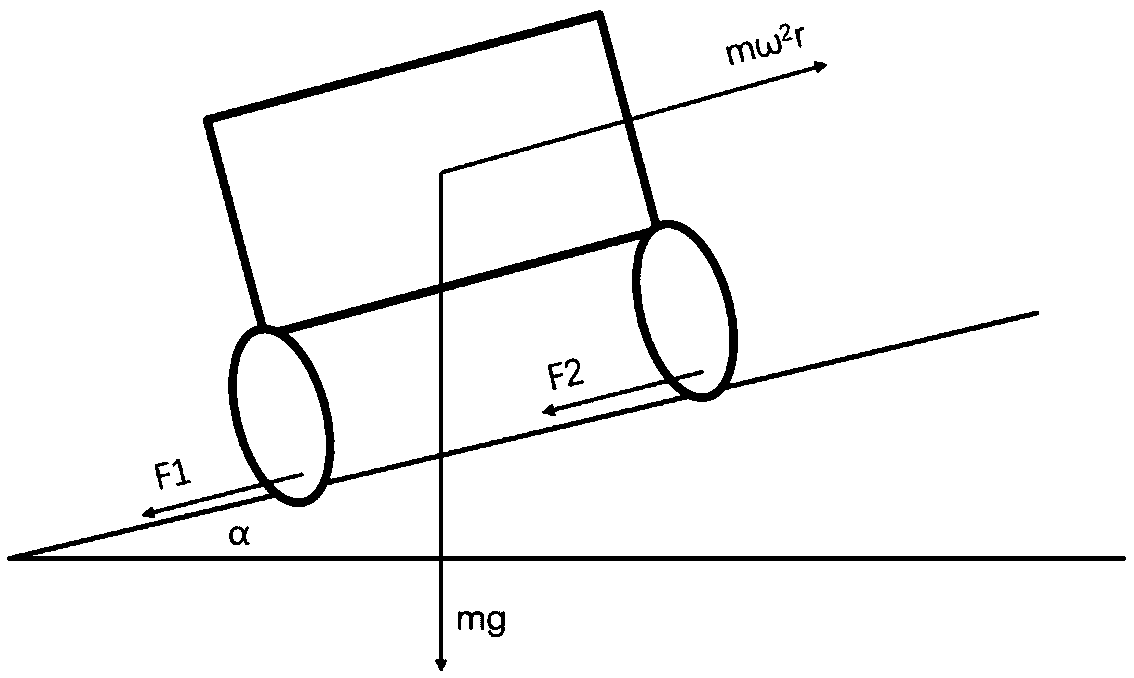
[0055] For the steering problem, the main research is to use the intelligent collaborative control of body attitude and all-wheel steering to ensure the track tracking accuracy of the all-terrain platform, and at the same time improve the lateral stability, sensitivity and safety of the vehicle. Active attitude control uses the active center of mass offset of the vehicle body, more actively utilizes the balanced gravity distribution between the wheels and the coupling between the side slip angle and the yaw angle of the vehicle body, and improves steering sensitivity and lateral safety. Active all-wheel steering further optimizes lateral stability and safety by adjusting the steering angle of the rear wheels. The intelligent collaborative control method integrates the advan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com