Induction type three-phase asynchronous torque motor unwinding driving circuit and method
A torque motor and three-phase asynchronous technology, which is applied in the field of induction three-phase asynchronous torque motor unwinding drive circuit, can solve the problem of requiring dozens of torque motors at least, and one or two hundred at most, wasting labor and time, and implementing Cost increase and other issues, to save manpower and time costs, reduce the effect of control costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
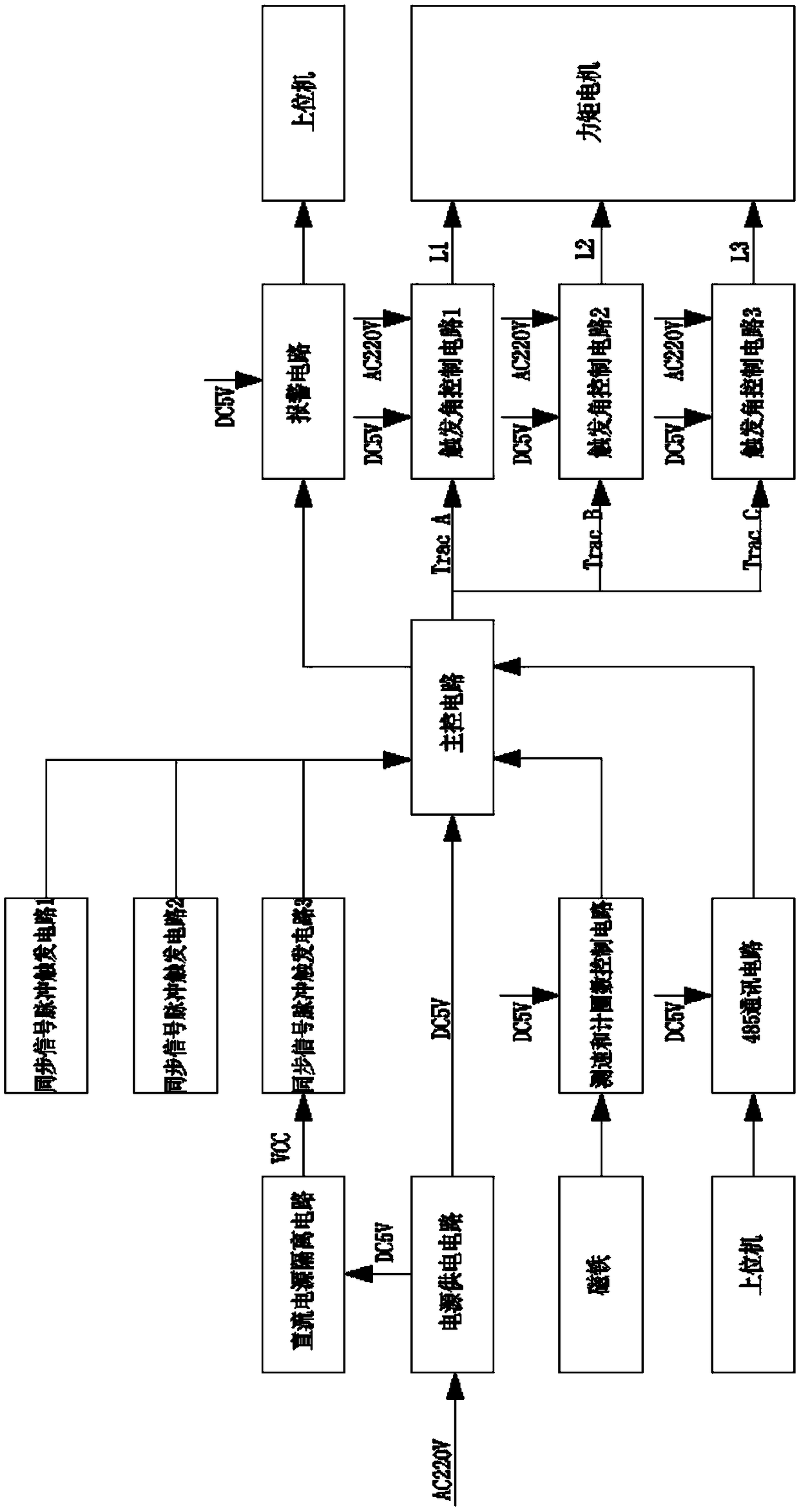
[0031] The unwinding drive circuit of the induction type three-phase asynchronous torque motor in the present invention includes: a power supply circuit, a synchronous signal pulse trigger circuit, a main control circuit and a trigger angle control circuit; The rectification and step-down are DC5V, and supply power to the synchronous signal pulse trigger circuit, the main control circuit and the trigger angle control circuit respectively; the synchronous signal pulse trigger circuit is an analog differential comparison circuit, which includes two comparators, the two comparators The reference voltage is used for voltage comparison with the AC220 unidirectional AC sine wave...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com