

Method and system for planning escape route for spacecraft
A path planning and spacecraft technology, applied in control/regulation systems, instruments, integrated navigators, etc., can solve problems such as complex solution process, long time-consuming, and reduced solution complexity, to achieve accurate positioning and reduce problem dimensions Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
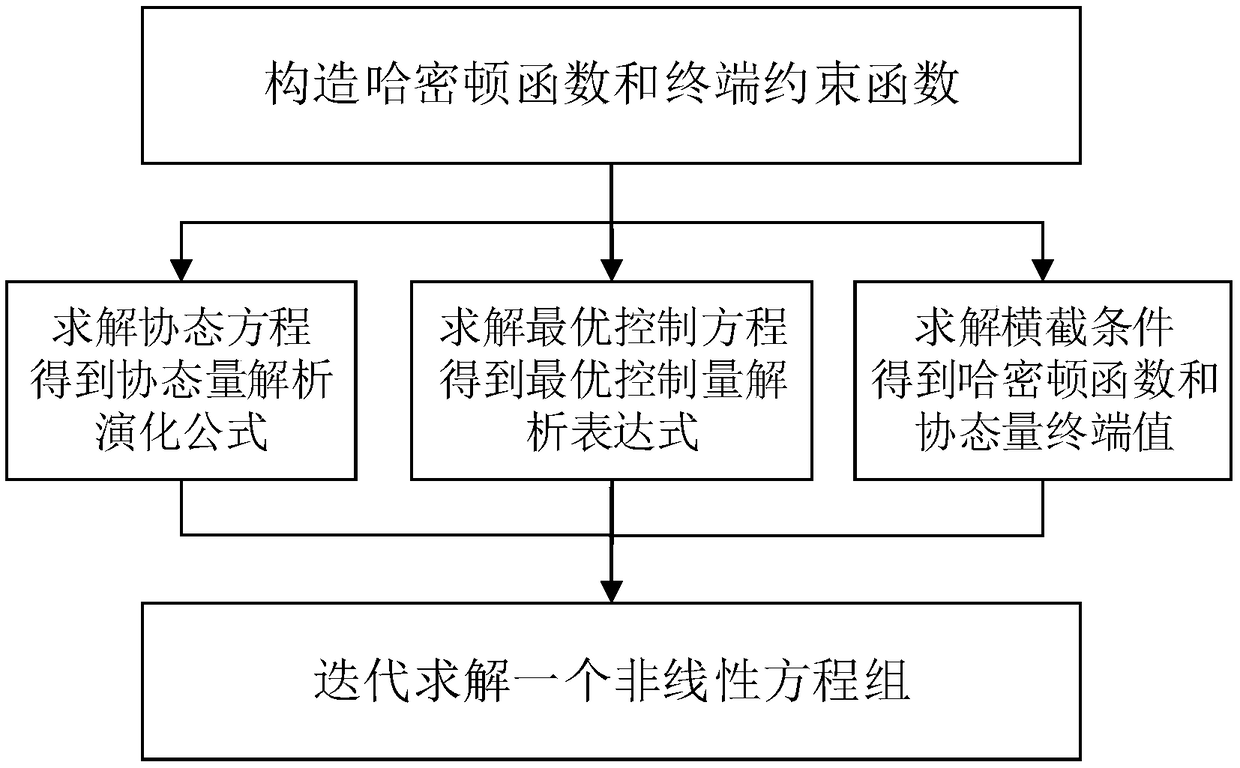
[0041] Such as figure 1 As shown, the embodiment of the present invention provides a method for planning an escape path of a spacecraft, including the following steps:
[0042] S1, based on the near-circular deviation linear model, the difference between the track deviation elements of the tracking spacecraft and the escaping spacecraft is used as the state variable to construct the Hamiltonian function of the differential game, according to the Hamiltonian function and the tracking spacecraft successfully intercepts the escaping spacecraft as the end condition Construct the terminal constraint function of the differential game;
[0043] Said S1 comprises the following steps:
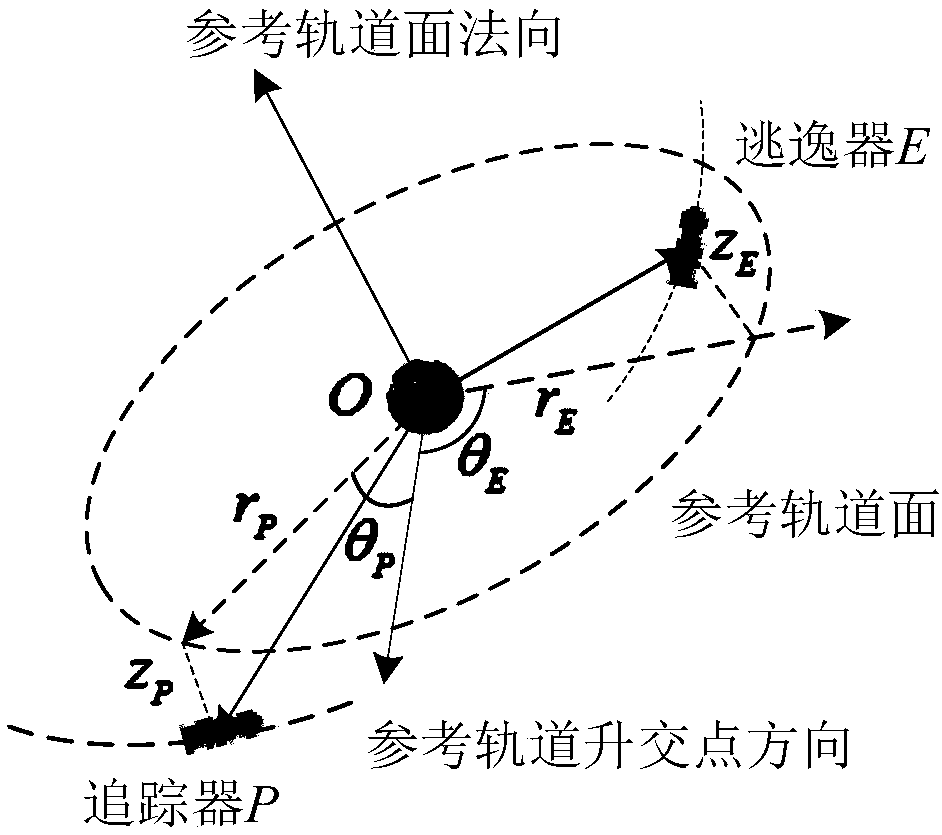
[0044] S101, describing the state equation of the differential game through the near-circle deviation equation;
[0045] see figure 2 , establish the orbital polar coordinate system O E -rθz, the origin of the coordinate system is at the center of the earth O, r is the projection of the orbital dis...
Embodiment approach 1
[0122] This embodiment is a chase-and-flight game between two spacecraft in low-earth orbit.
[0123] Such as figure 2 As shown, in this embodiment, a method for efficiently solving the saddle point of the survival-type pursuit-and-escape differential game of a spacecraft includes:
[0124] S0, input parameters, input the following scene parameters of the on-orbit chase and escape game:
[0125] Table 1 Embodiment 1 parameter configuration
[0126]
Semi-major axis / km
Eccentricity
Orbit inclination / °
ascending node right ascension / °
Angular distance of perigee / °
True anomaly / °
Acceleration / °
tracking device
7378.137
0.0004
20
29.6
0
0
0.09g
escape device
7578.137
0.0002
22.2
27.2
0
16
0.03g
reference point
7478.137
0
21.1
28.4
0
0
0g
[0127] The scenario parameters correspond to physical quantities:
[0128]
[0129] where x 0 is the initial val...
Embodiment approach 2
[0141] The steps of this embodiment are basically the same as those of Embodiment 1, and the main difference is that the initial parameters input in step S0 are different. In this embodiment, the two spacecrafts are pursuing and fleeing at the height of the geosynchronous orbit, and the maneuverability is not much different.
[0142] S0, input parameters, input the following scenario parameters of the pursuit-fleeing game at the height of the synchronous orbit:
[0143] Table 3 Embodiment 2 parameter configuration
[0144]
Semi-major axis / km
Eccentricity
Orbit inclination / °
ascending node right ascension / °
Angular distance of perigee / °
True anomaly / °
Acceleration / °
tracking device
42378.137
0.0004
0.8
0
0
0
0.006g
escape device
42578.137
0
0
0
0
14
0.004g
reference point
42478.137
0
0.4
0
0
0
0g
[0145] The scenario parameters correspond to physical q...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More