

A method and system for robot motion route planning based on remote control
A robot movement and robot technology, applied in the direction of control/regulation system, non-electric variable control, two-dimensional position/channel control, etc., can solve the problem that the robot cannot complete the work on time, the route planning error, and the obstacle in the robot planning route, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
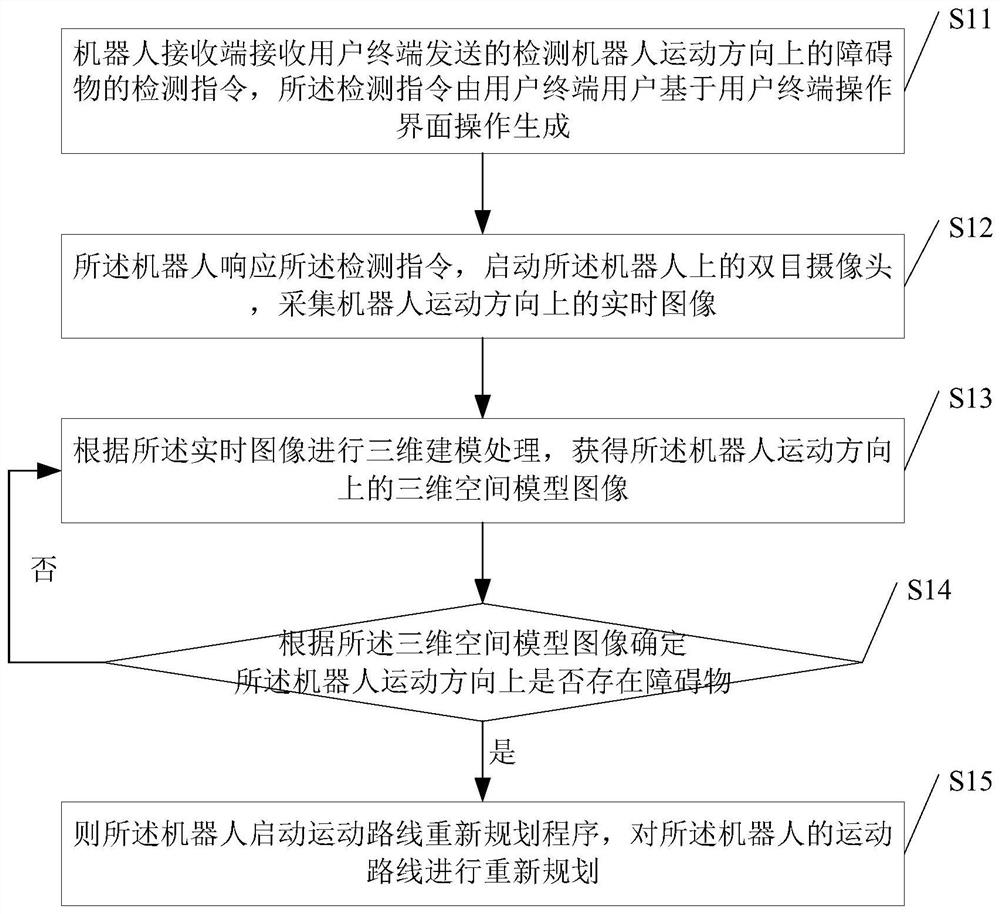
[0045] see figure 1 , figure 1 It is a schematic flowchart of a method for planning a robot's motion route based on remote control in an embodiment of the present invention.
[0046] Such as figure 1 Shown, a kind of robot movement route planning method based on remote control, described method comprises:
[0047] S11: The receiving end of the robot receives a detection instruction for detecting obstacles in the moving direction of the robot sent by the user terminal, and the detection instruction is generated by the user of the user terminal based on the user terminal operation interface;
[0048] In the specific implementation process of the present invention, the detection instruction is generated by the user of the user terminal based on the operation of the user terminal operation interface, including: the user performs identity authentication on the user terminal operation interface to confirm that the user is a legitimate user; After the user is a legitimate user, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More