

A vehicle relative position estimation method based on high-speed visual feature point matching
A technology of visual features and relative positions, applied in image data processing, instruments, character and pattern recognition, etc., can solve problems such as difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
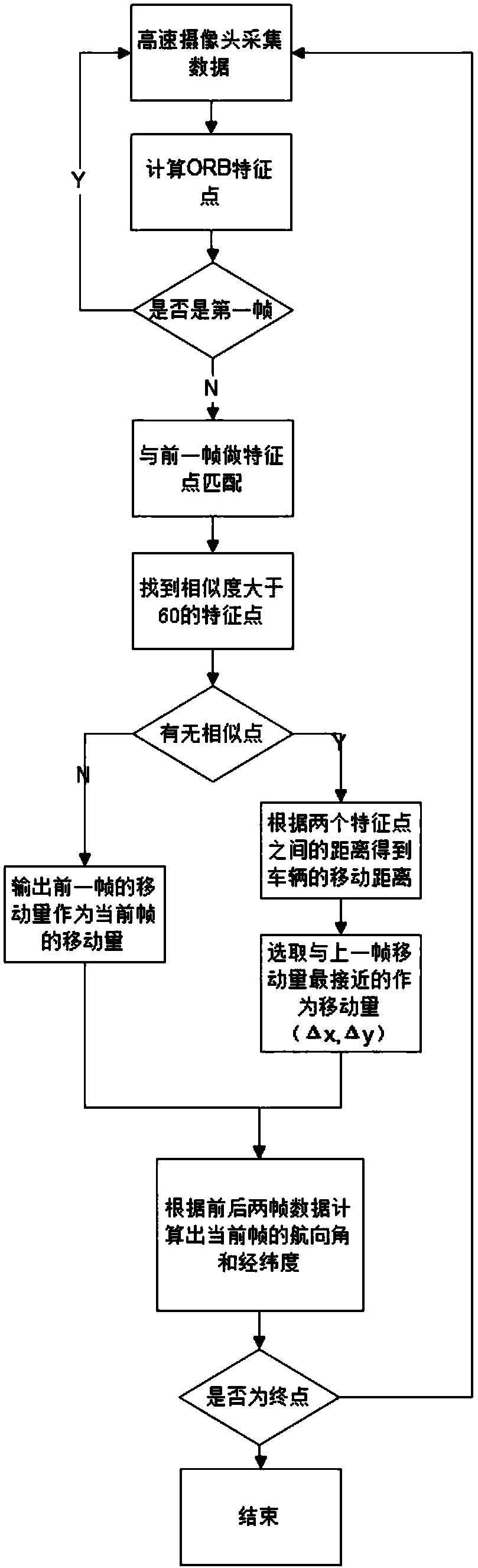
[0040] figure 1 It is a flow chart of the method of the embodiment of the present invention. Such as figure 1 As shown, the present invention provides a method for inferring the relative position of a vehicle based on high-speed visual feature point matching, including:
[0041] Step 1. Install a high-speed ground camera with a frame rate of not less than 500fps, which needs to be vertical to the ground; use the data collected by the camera to calculate the position of the vehicle, and solve the position estimation of the scene without satellite positioning signals. Use the vertical downward camera to solve the situation where most of the field of view is occupied by moving objects. Use a high-speed camera to sol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More