A mountain patrol route planning system and a use method thereof
A technology for planning systems and lines, applied in the field of electric power, can solve problems such as line of sight occlusion, inability to determine walking direction, inability to get out of mountains, etc., and achieve the effect of avoiding getting lost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The accompanying drawing is the best embodiment of the mountain inspection route planning system, and the present invention will be further described in detail below in conjunction with the accompanying drawings.
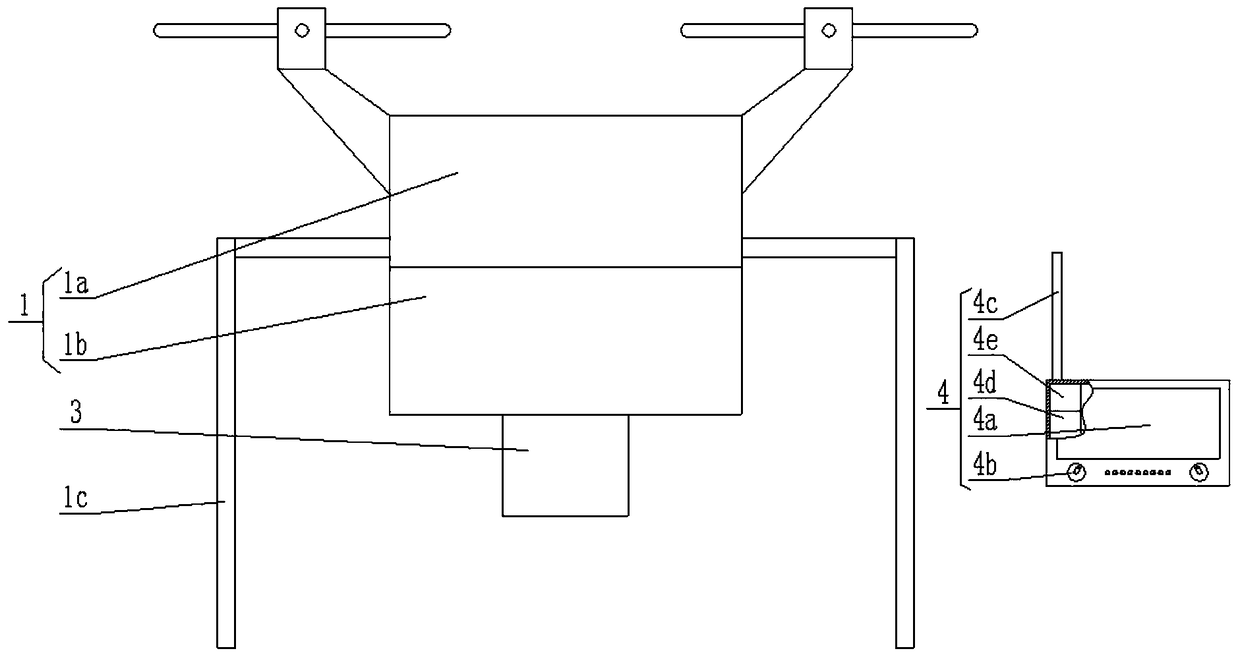
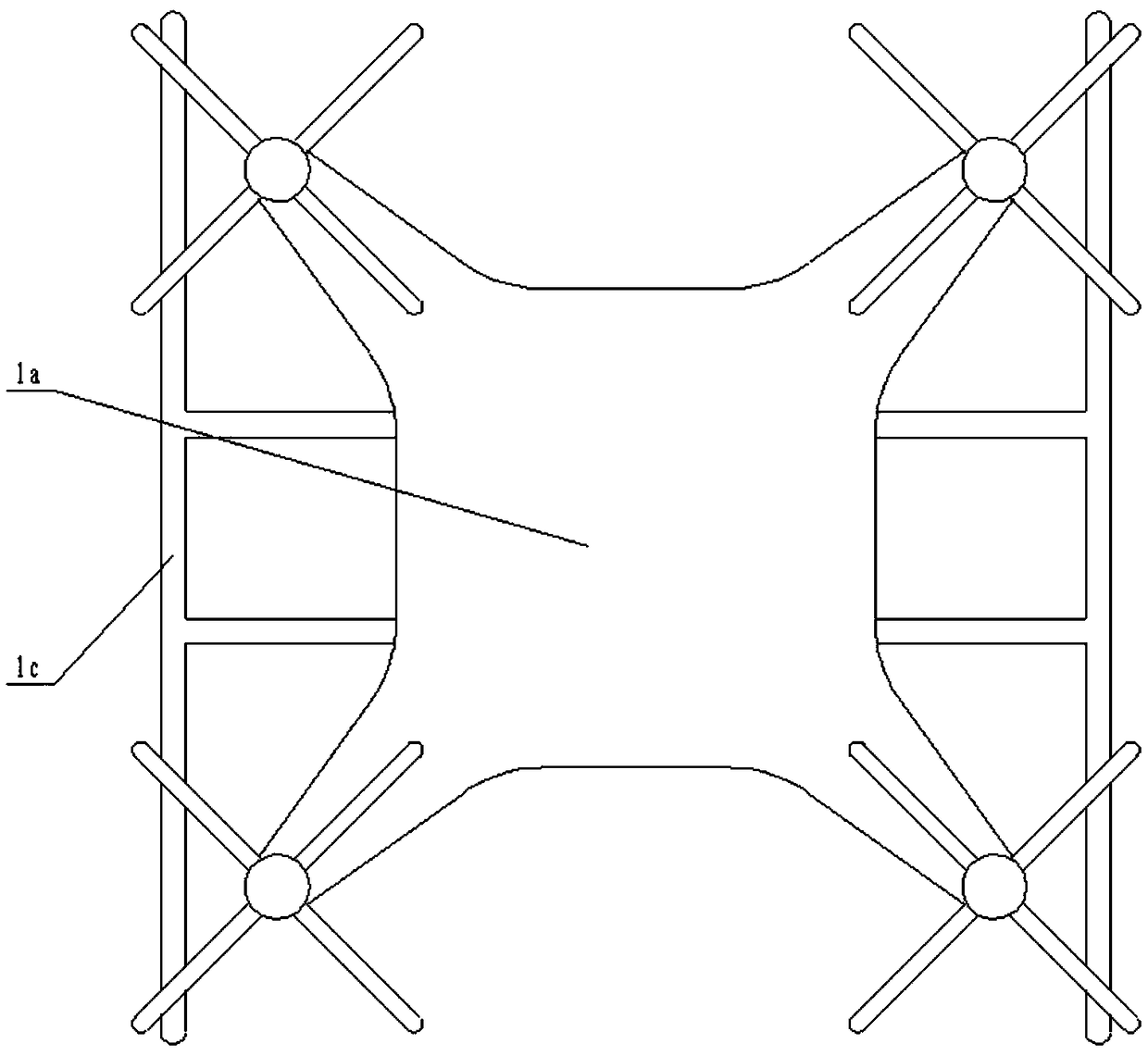
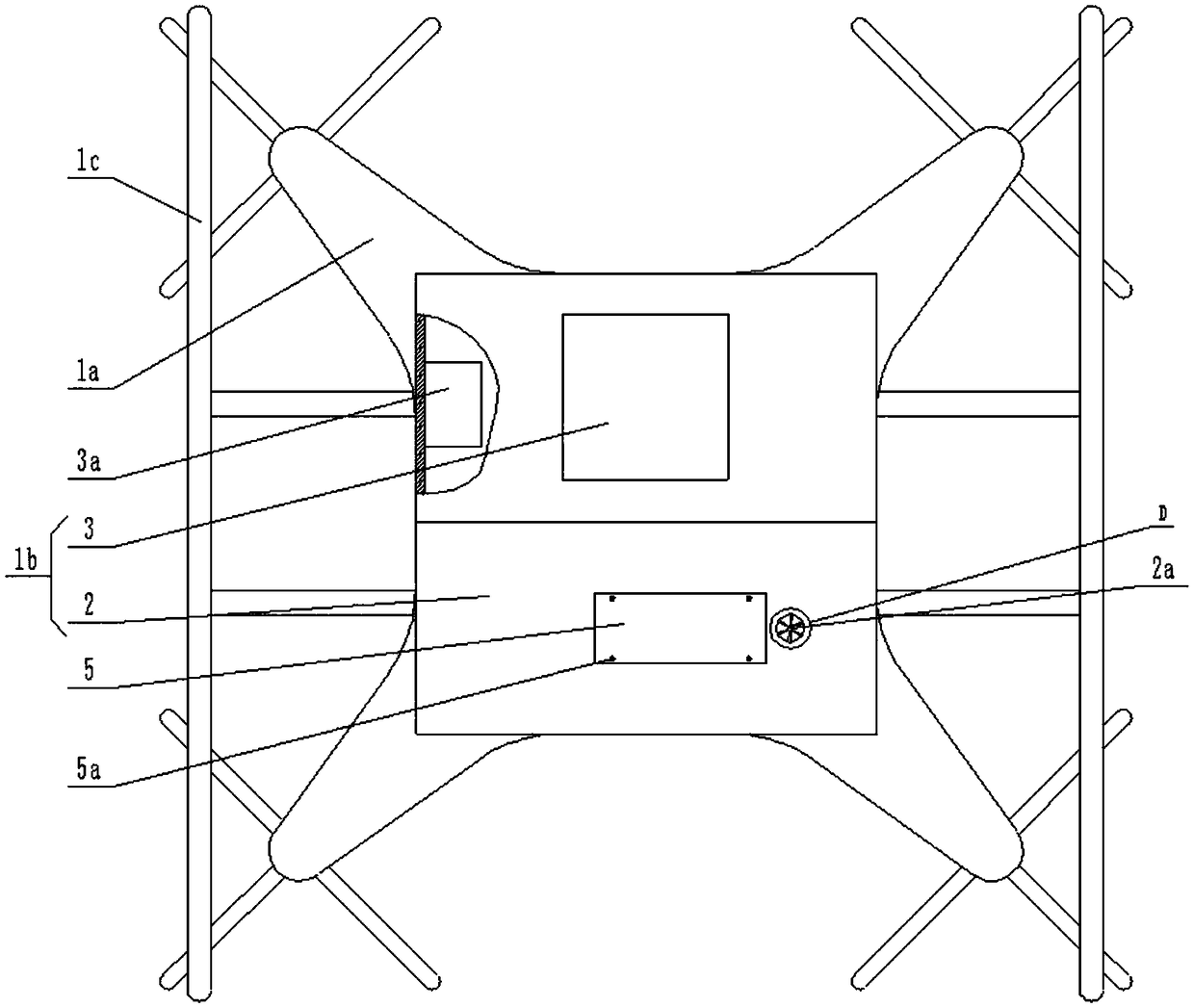
[0068] attached by figure 1 As shown, a mountain inspection route planning system includes an aircraft 1 and a control handle 4 . The aircraft 1 includes an unmanned aerial vehicle 1a, a hanger 1b installed on the belly of the unmanned aerial vehicle 1a, and landing supports 1c on both sides of the unmanned aerial vehicle 1a. The landing bracket 1c prevents the UAV 1a from colliding with the hanger 1b when it lands. attached by image 3 As shown, the hanger 1b includes a beacon transmitter module 2 and a topographic mapping module 3 .
[0069] attached by Figure 4 As shown, the bottom surface of the beacon emission module 2 is concaved with an electronic landmark storage room 2f, the left side of the electronic landmark storage room 2f is provided with a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



