

Variable-stiffness pneumatic software driver based on particle blocking
A technology of soft drive and variable stiffness, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc. It can solve the problems of difficult material selection, complicated production, and difficult realization, and achieves the advantages of improved response speed, increased volume, and large output force. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
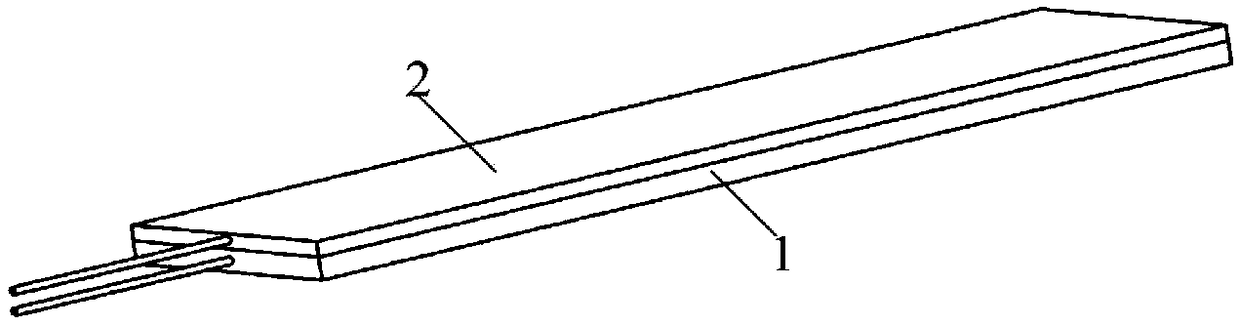
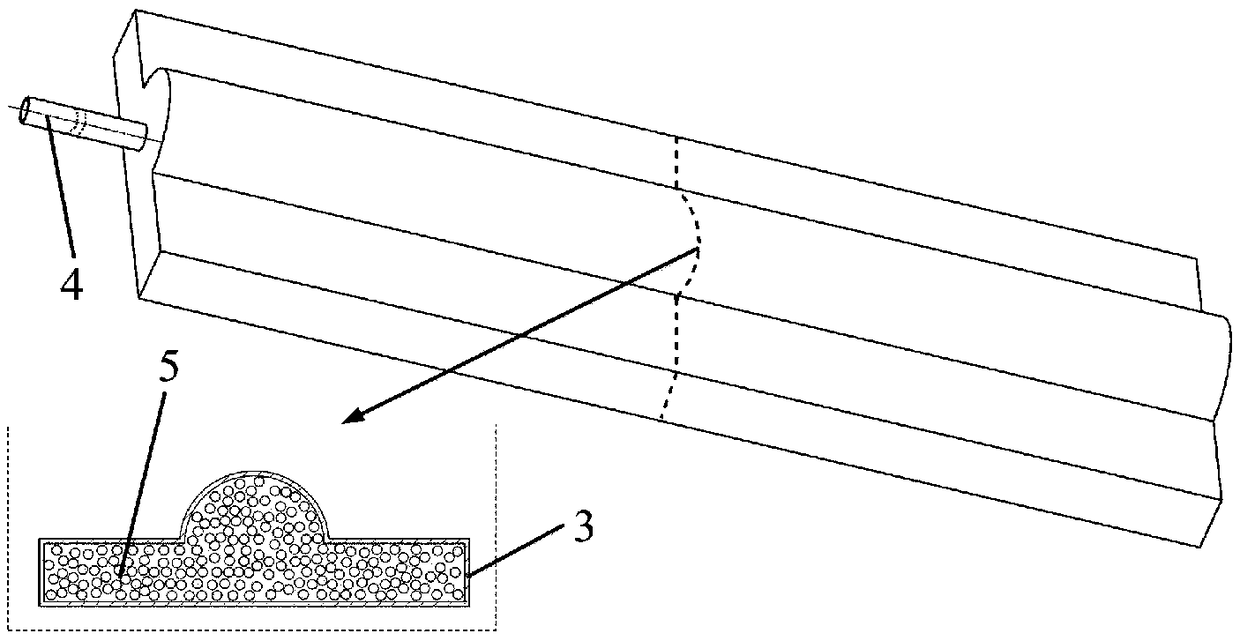
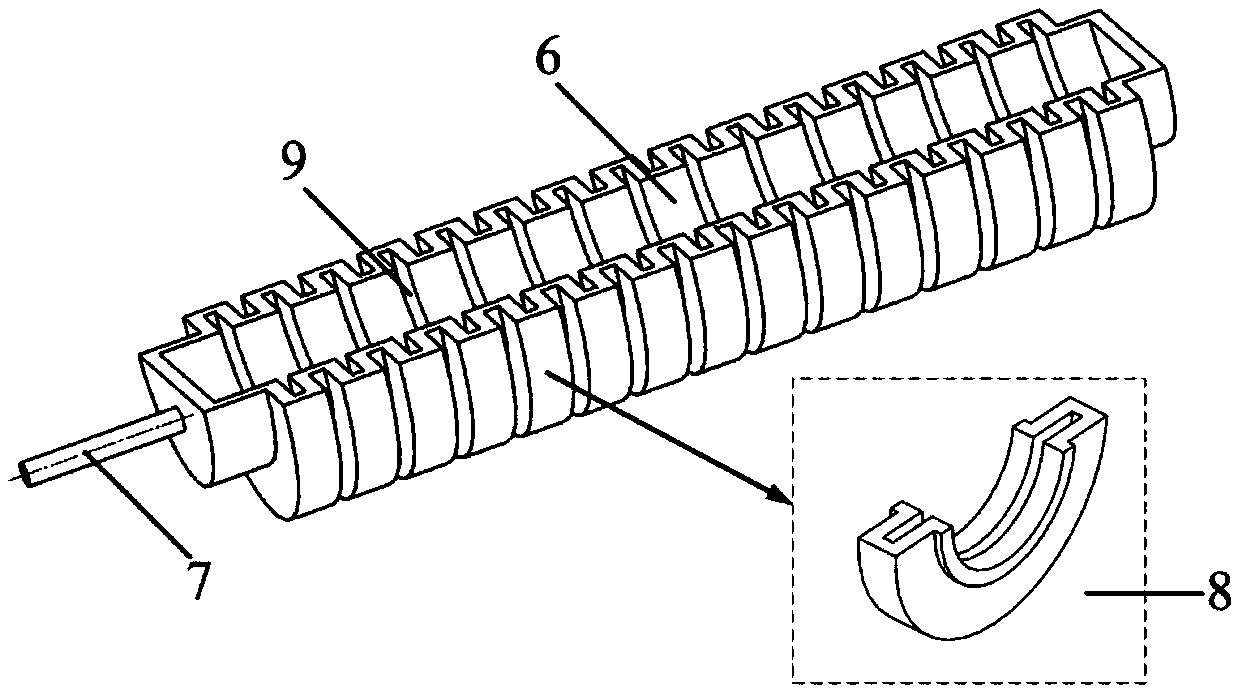
[0023] Such as Figure 1-Figure 4 As shown, a kind of variable stiffness pneumatic soft actuator based on particle blocking according to the present invention includes a blocking layer 1 and a driving layer 2; The deformable layer 6 and the second air tube 7 are expanded.
[0024] Part of the flexible film on the flexible capsule of the blocking layer is made of a material with high hardness and has a protruding cavity structure, which can increase the volume of blocking particles in the blocking layer, increase the maximum rigidity of the soft actuator, and reduce the gas volume required for the driving layer , which imp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More