A real-time communication control method for an unmanned vehicle
An unmanned vehicle and real-time communication technology, applied in the field of real-time communication control of unmanned vehicles, can solve the problems of transmission mechanism lag, prone to conflict, occupying bus resources, etc., so as to shorten the information interaction time and avoid information Conflict, the effect of reducing hardware cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
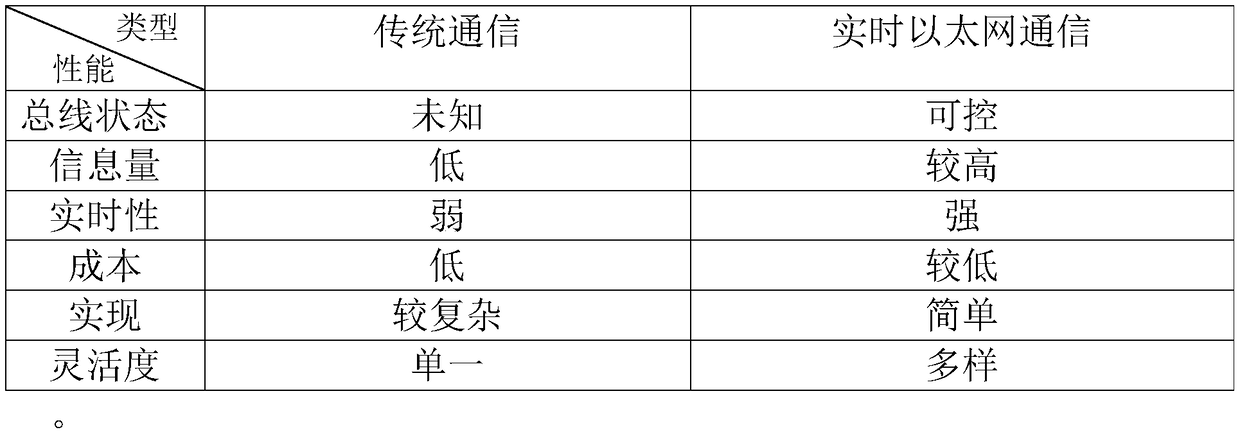
[0041] In the prior art, the "idle" or "busy" status of the bus is unknown, and conflicts are likely to occur, resulting in signal errors.
[0042] The application of the present invention will be further described below in conjunction with specific analysis.
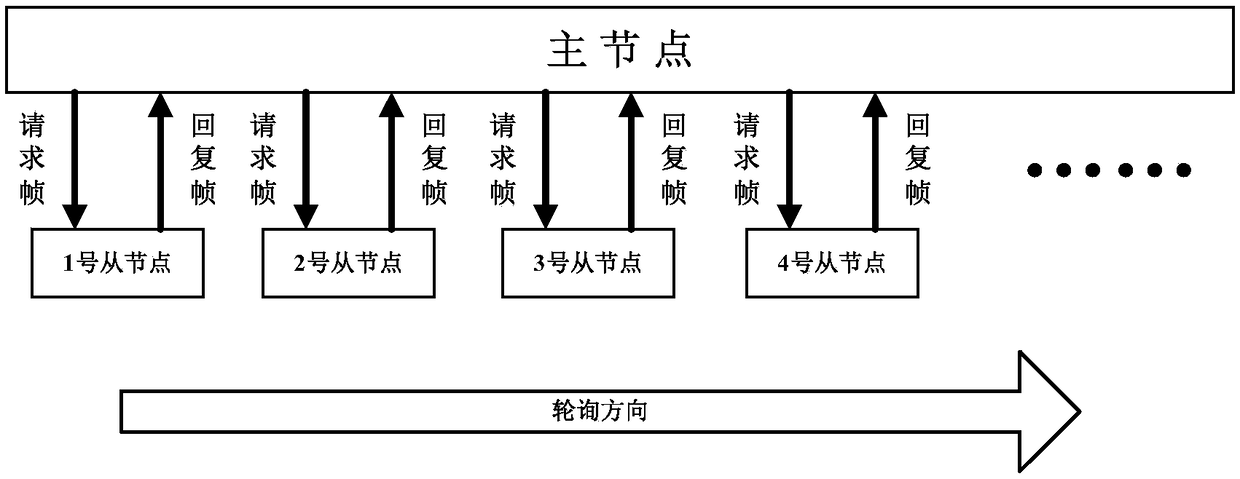
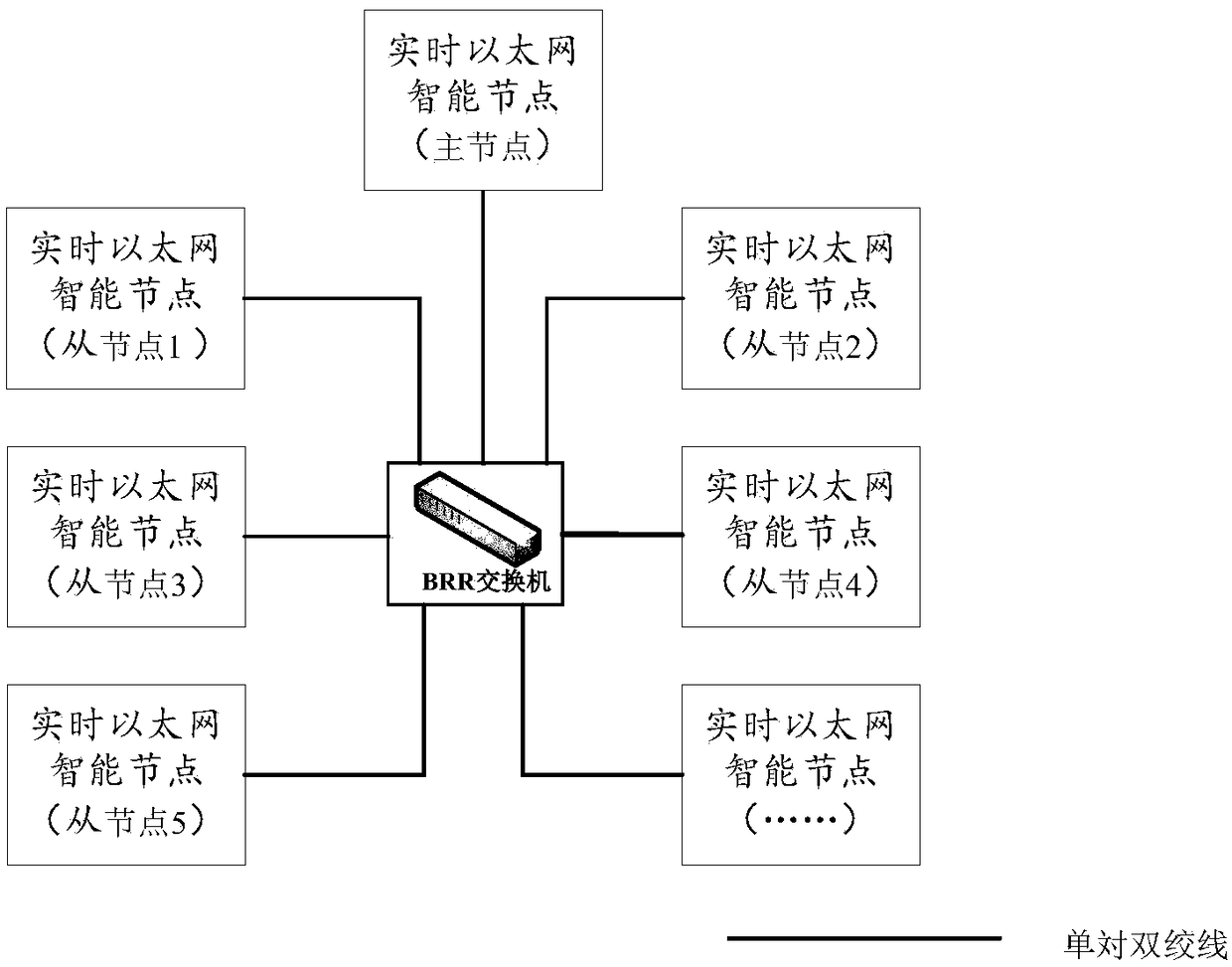
[0043]In the real-time communication control method for unmanned vehicles provided by the embodiment of the present invention, the network is composed of a plurality of real-time Ethernet intelligent communication nodes, and each real-time Ethernet intelligent communication node is interconnected by a single twisted pair and a switch , forming a real-time Ethernet v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More