

Automatic clamping and feeding mechanical gripper
A mechanical gripper and automatic technology, applied in the direction of conveyor objects, transportation and packaging, can solve the problems of increasing labor costs, reducing and wasting operator working time, and achieves lower labor costs, lower labor operations, and reasonable structural design. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
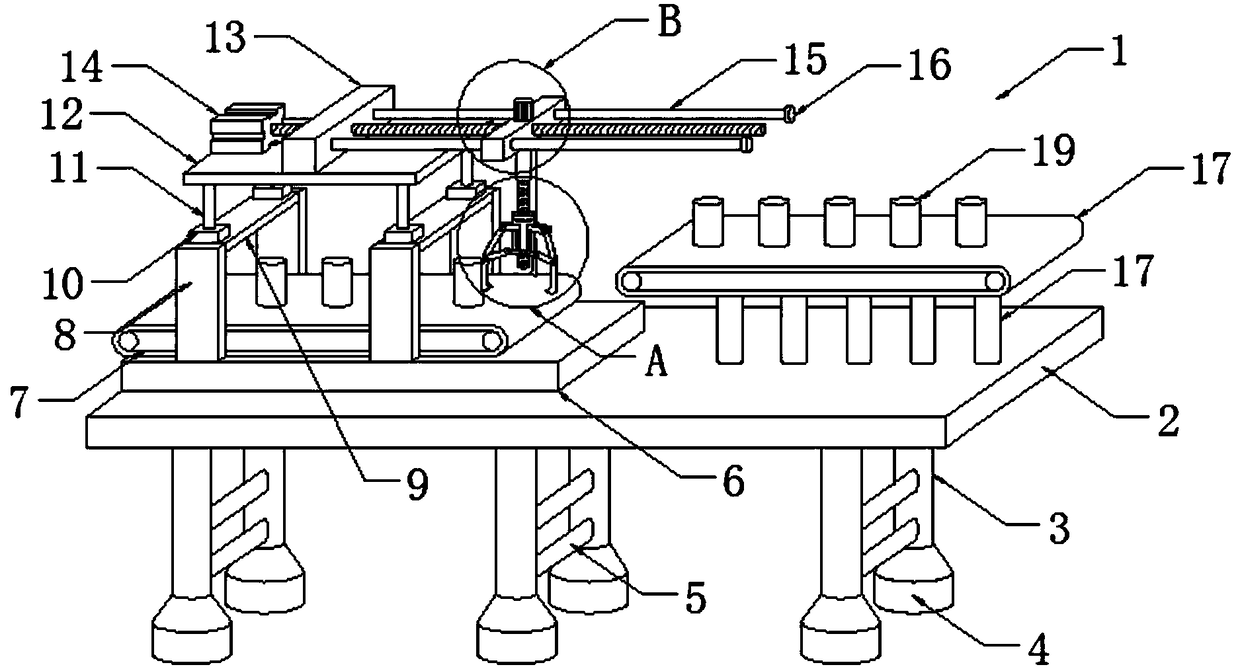
[0024] Such as Figure 1-5 As shown, an automatic clamping and feeding mechanical gripper includes a device body 1, and the device body 1 includes a table 2, and table legs 3 are fixedly installed at the four corners of the bottom of the table 2 and at both ends of the middle part. The bottoms of the table legs 3 are provided with support anti-slip mats 4, two connecting rods 5 are fixedly connected between the two shortest distances between the table legs 3, and the top end of the table 2 is fixedly installed with a first bearing plate 6 , the top of the first load-bearing plate 6 is provided with a first conveyor belt 7, the top of the first load-bearing plate 6 is provided with several vertical plates 8, and a top plate 9 is fixedly installed between the tops of two vertical plates 8, and the Both ends of the top plate 9 top are fixedly equipped with support blocks 10, the top of the support block 10 is fixedly equipped with support columns 11, and a second load-bearing pla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More