

A hybrid depth estimation method based on light field data
A technology of depth estimation and light field data, applied in image data processing, calculation, image analysis, etc., can solve the problems of high algorithm complexity and accuracy improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0156] The hybrid depth estimation method based on light field data of the present invention adopts the existing technology to obtain the basic light field camera data, and the light field image can be captured by a Lytro camera, and the focus stack image and the full focus image can be extracted by using LytroDesktop software. Depth of focus is used as a parameter, and the focus stack image within the maximum depth of field range is extracted from the foreground to the background with a step size of 0.2. Use the matlab tool library LFToolbox0.4 to get the sub-image.
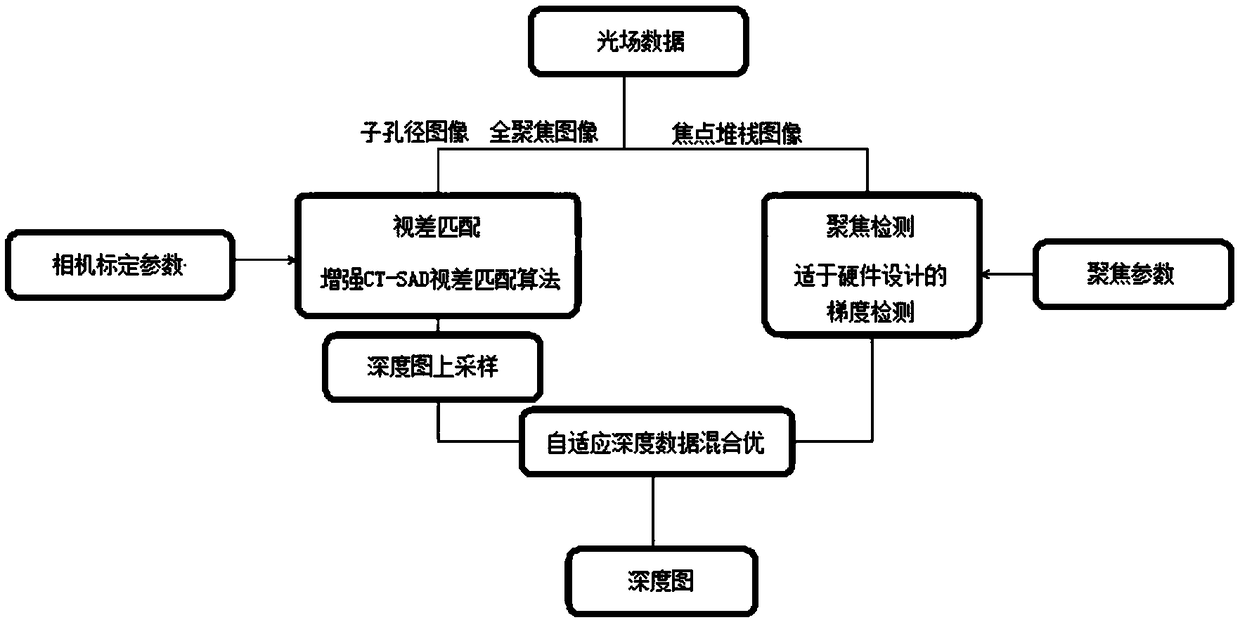
[0157] combine figure 1 , a hybrid depth estimation method based on light field data, comprising the following steps:
[0158] Step 1: Acquire light field data: Obtain four-dimensional light field image data through a light field camera, and obtain the focus stack image, sub-image, full-focus image and focus parameters of the scene after processing, where the focus parameters include white image calibration par...
Embodiment approach
[0180] Further, the parallax post-processing, that is, performing denoising processing on the parallax map, the specific implementation method is as follows:
[0181] Using the median filter of m×n window, the formula is as follows:
[0182]
[0183] In the implementation, the disparity value Dn is obtained after m=n=8 median filtering; the disparity map is represented by pixels, and the disparity is converted into a low-resolution depth map Z' by using the camera calibration parameters and the disparity conversion relationship b .
[0184] Step 3: Upsampling based on bilateral filtering: In the process of acquiring sub-images of light field data, the pixel resolution is reduced, and an upsampling process is required; the light field full-focus image has clear texture characteristics, which can improve the quality of the depth map; combined with The full-focus color image of the light field and the small-resolution depth image obtained by parallax estimation are subjected ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More