

Flexible single-hole minimally invasive surgery robot
A minimally invasive surgery and robot technology, applied in surgical manipulators, surgical robots, surgery, etc., can solve the problems of reduced motion accuracy, reduced maneuverability, deformation of flexible parts, etc., and achieves high precision results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
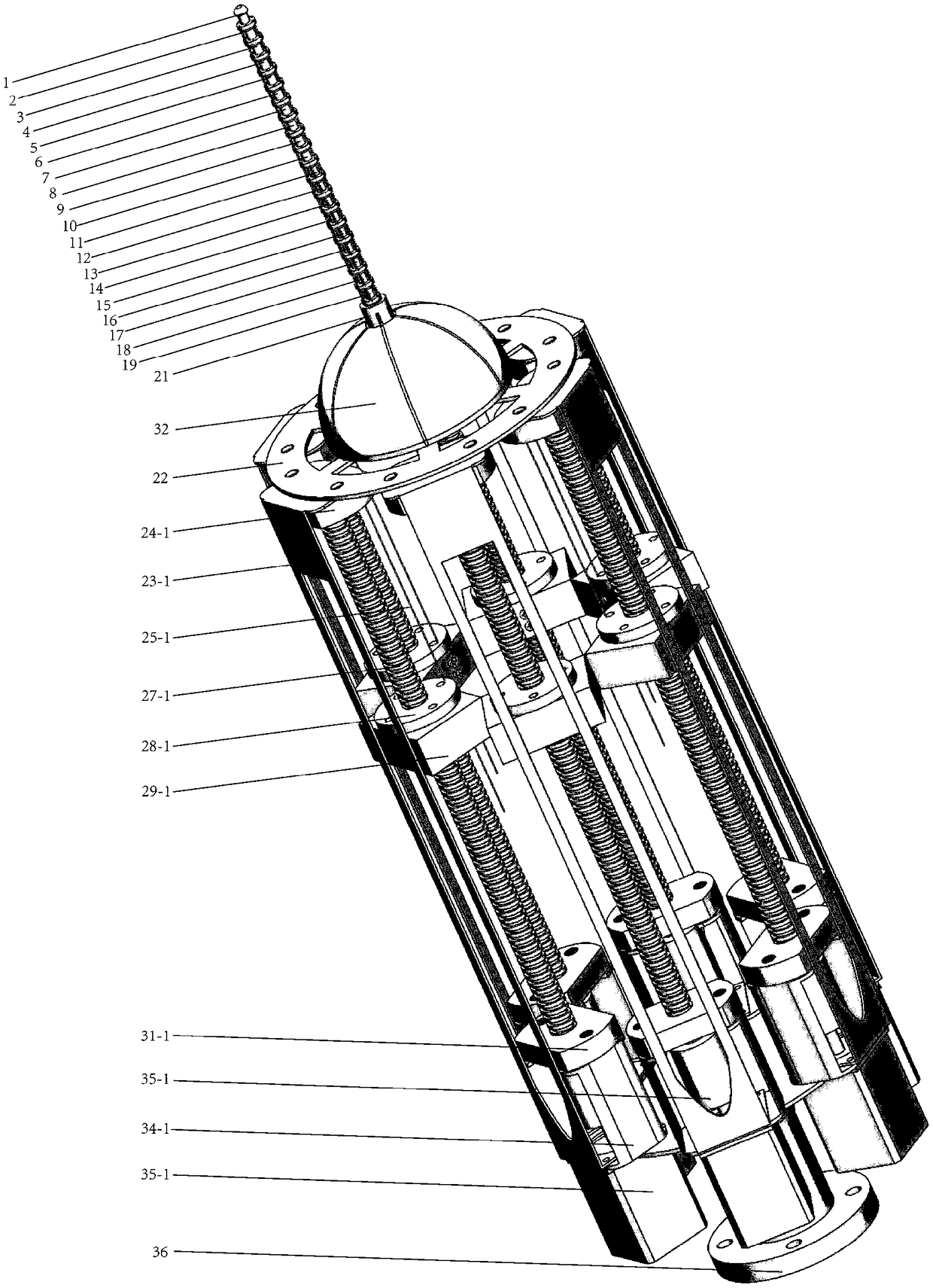
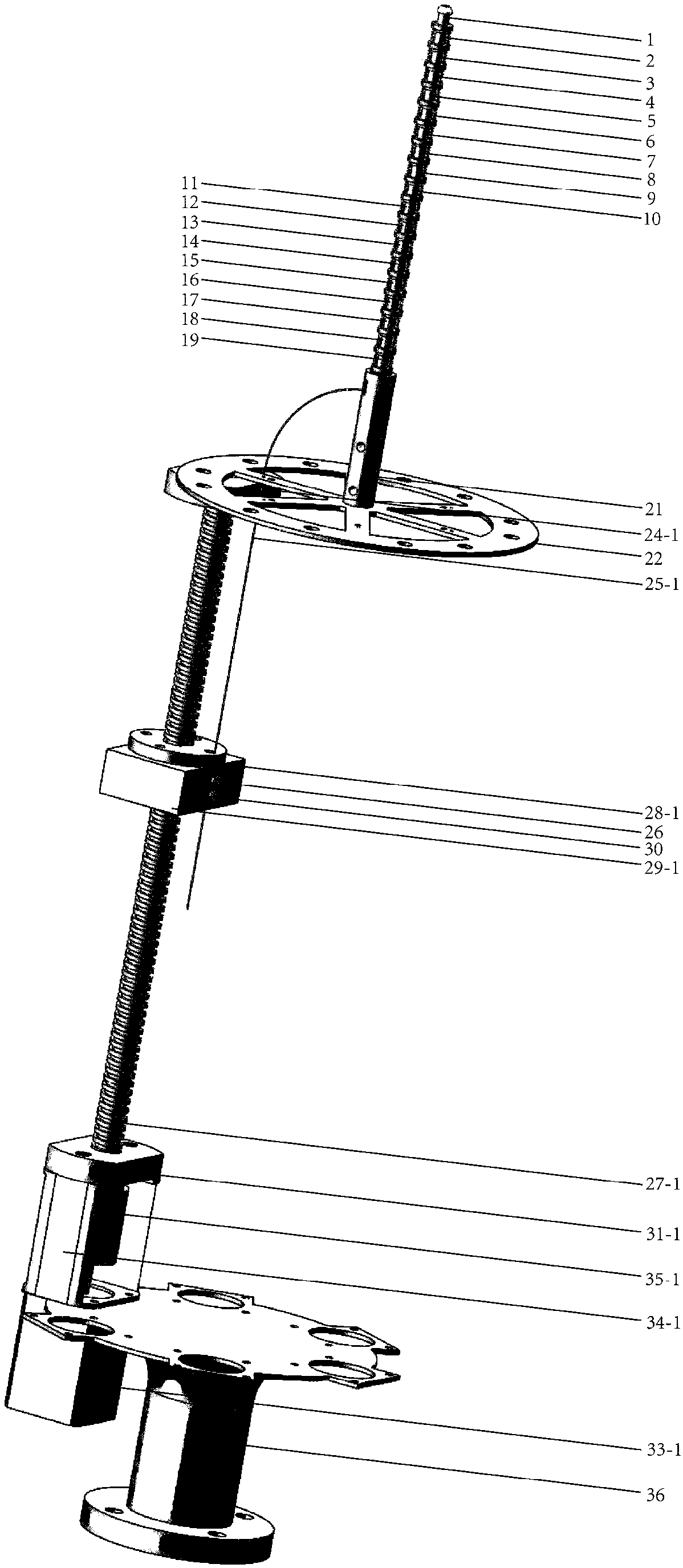
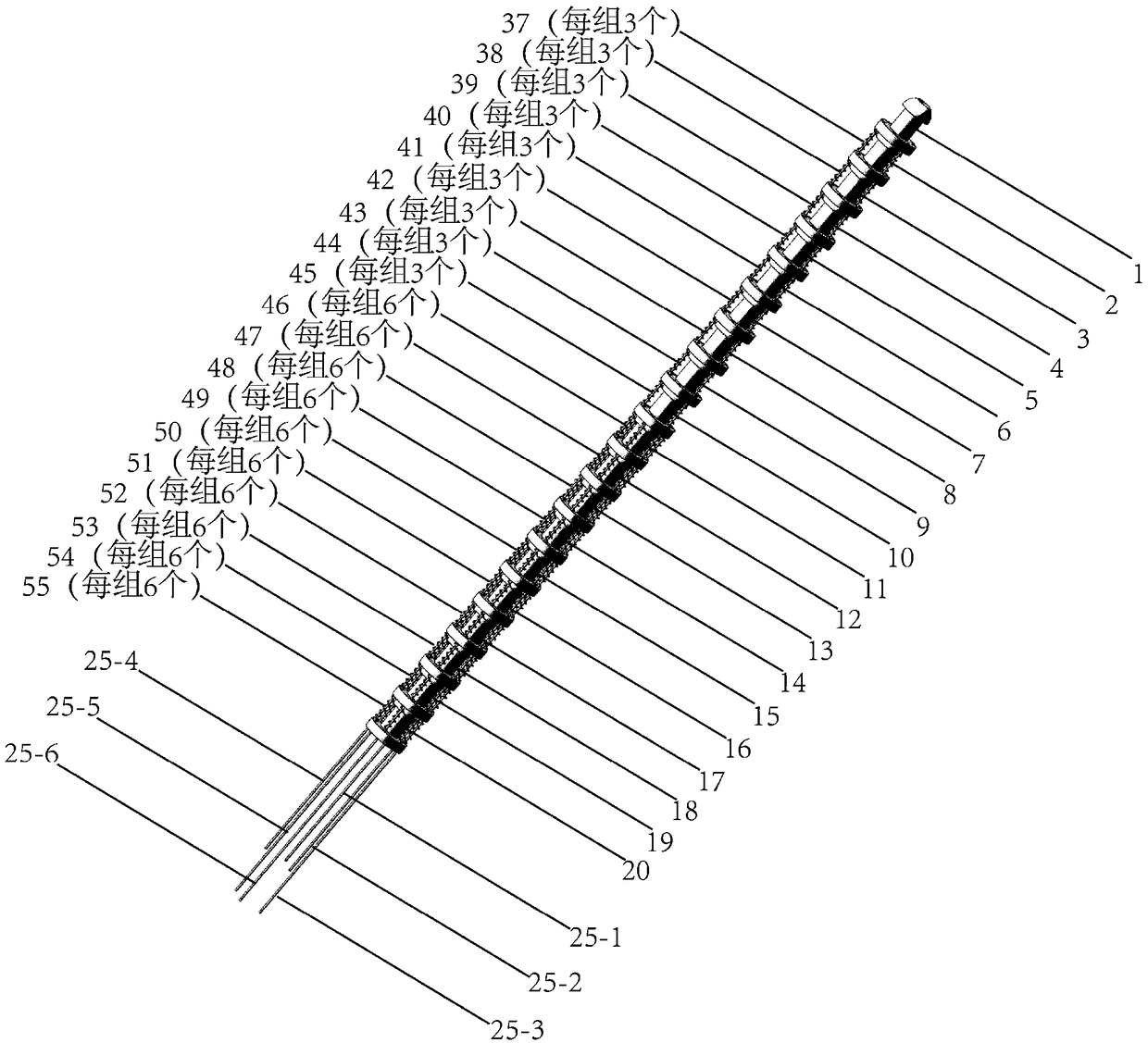
[0019] The present invention is a flexible single-hole minimally invasive surgical robot, such as figure 1 As shown, including 1 flexible unit body, 2 flexible unit body, 3 flexible unit body, 4 flexible unit body, 5 flexible unit body, 6 flexible unit body, 7 flexible unit body, 8 flexible unit body, 9 flexible unit body, 10 Flexible unit, 11 flexible unit, 12 flexible unit, 13 flexible unit, 14 flexible unit, 15 flexible unit, 16 flexible unit, 17 flexible unit, 18 flexible unit, 19 flexible unit, 20 Flexible unit body, 21 flexible unit body base, 22 top plate, 23 guide rail, 24-1 bearing seat, 25 nickel-titanium alloy wire, 26 bolt, 27-1 screw rod, 28-1 screw rod flange nut, 29-1 Flange nut seat, 30 bolts, 31-1 bearing seat, 32, hemispherical shell, 33-1 motor, 34-1 bearing seat support frame, 35-1 coupling, 36 base, 37 spring group (3 for each gr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More