

Vehicle lateral stability control method based on speed dependence
A technology of lateral stability and control method, which is applied in the direction of control devices, vehicle components, driver input parameters, etc., and can solve the problems of not considering the uncertain factors of vehicle parameters and unable to guarantee stability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
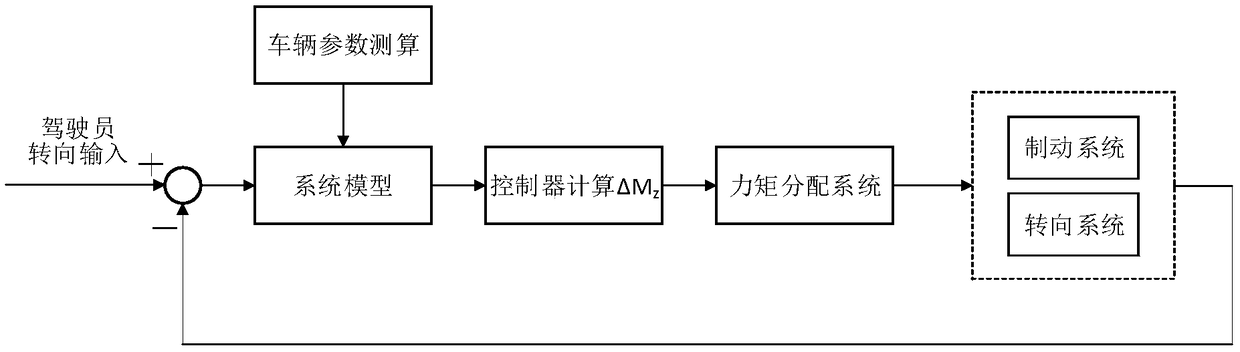
[0097] The invention discloses a vehicle lateral stability control method based on speed dependence, which specifically includes the following steps:
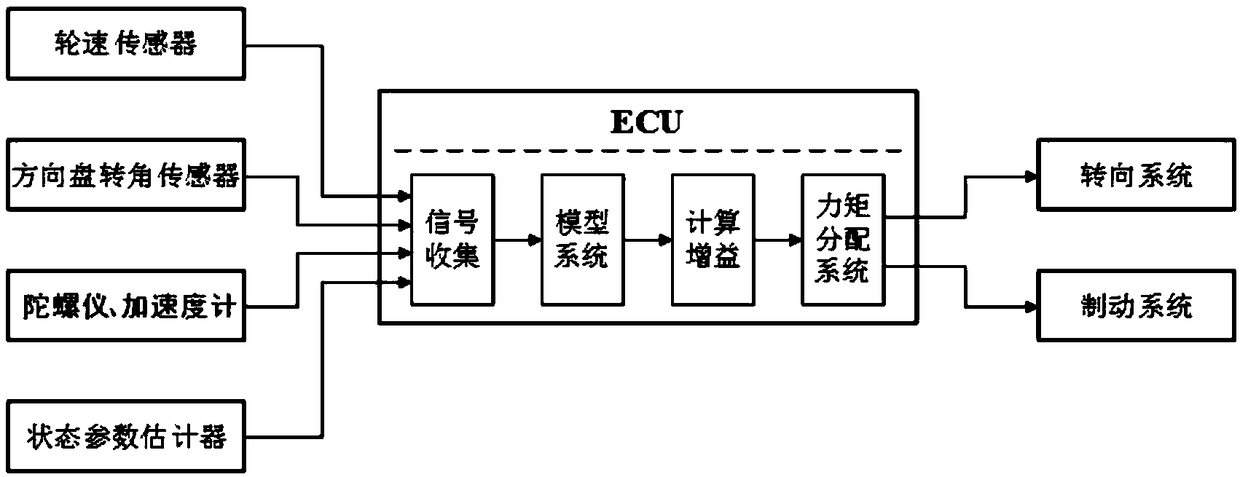
[0098] Step 1, collect the parameters of the car
[0099] The parameters to be collected include inherent parameters and real-time parameters, among which:
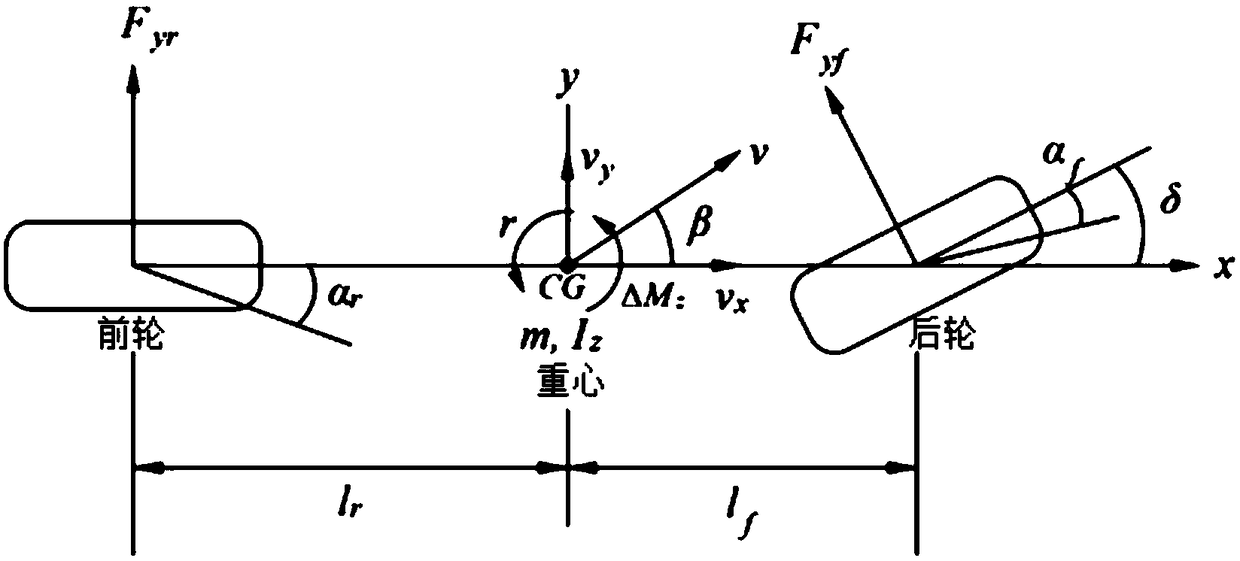
[0100] Intrinsic parameters include the total mass of the car m, moment of inertia I z , the distance from the front and rear axles to the center of gravity of the vehicle l f , l r , and the cornering stiffness C of the front and rear wheels f 、C r ; These parameters are intrinsic to the vehicle and can be collected and stored in advance.
[0101] Real-time parameters include front wheel steering angle δ, car longitudinal speed v x , yaw rate r, center-of-mass side slip angle β; among these parameters, the front wheel steering angle can be obtained by collecting the steering wheel angle through the sensor, and then calculated by the parameters of the steering transm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More