

Fault-tolerant consistency control algorithm for second-order multi-agent system based on sliding mode control theory
A technology of multi-agent system and control theory, applied in the field of fault-tolerant consensus control algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The present invention will be further explained below in conjunction with the accompanying drawings.
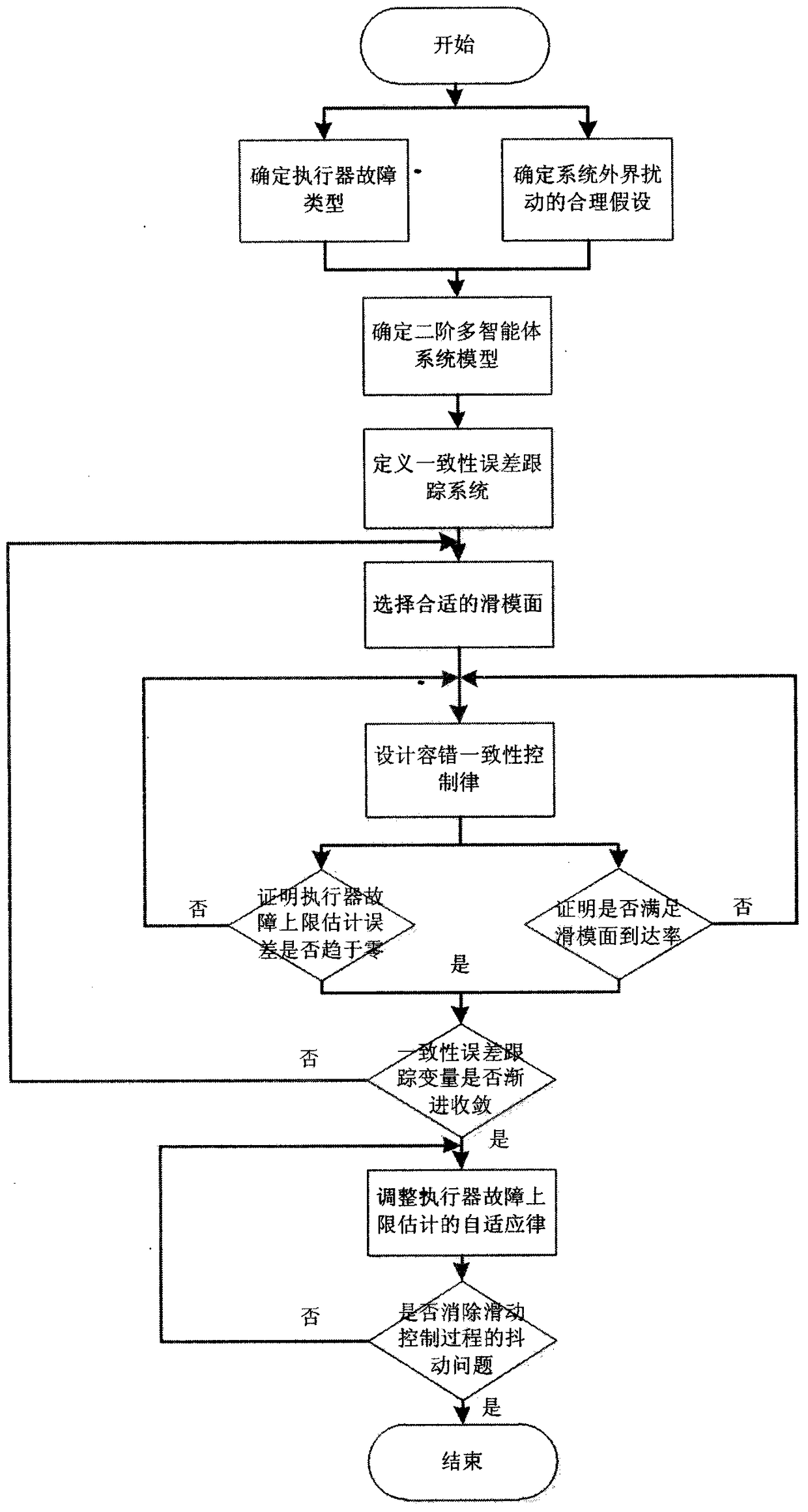
[0070] like figure 1 As shown, the present invention proposes a fault-tolerant consensus control algorithm for second-order multi-agent systems based on sliding mode control theory. First, the general applicable Lipschitz continuity condition assumption is made for the external nonlinear factors of the second-order multi-agent system. Then, an upper limit is assigned to the additive fault of the actuator and an adaptive change rate about this upper limit is proposed. Finally, using the estimated value of the upper limit of the additive failure of the actuator, a fault-tolerant control algorithm is proposed to make the second-order multi-agent system achieve consistency under the given assumptions and the additive failure of the actuator. This algorithm can solve the consensus realization problem of the second-order multi-agent system under the simultaneous action of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More