

Probability density-based unmanned aerial vehicle three-dimensional path obstacle avoidance method
A probability density, unmanned aerial vehicle technology, applied in three-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control, etc. It is difficult to fully predict, complex planning and decision-making, etc., to achieve the effect of easy implementation, improved obstacle avoidance efficiency, and good real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] In order to meet the lightweight requirements of UAV recording equipment, the present invention proposes a probability density-based UAV three-dimensional path obstacle avoidance system and obstacle avoidance method for the flight characteristics of multi-rotor UAVs. Effectively realize real-time detection and avoidance of obstacles for multi-axis drones along the flight direction, and at the same time meet the needs of lightweight recording equipment for drones.
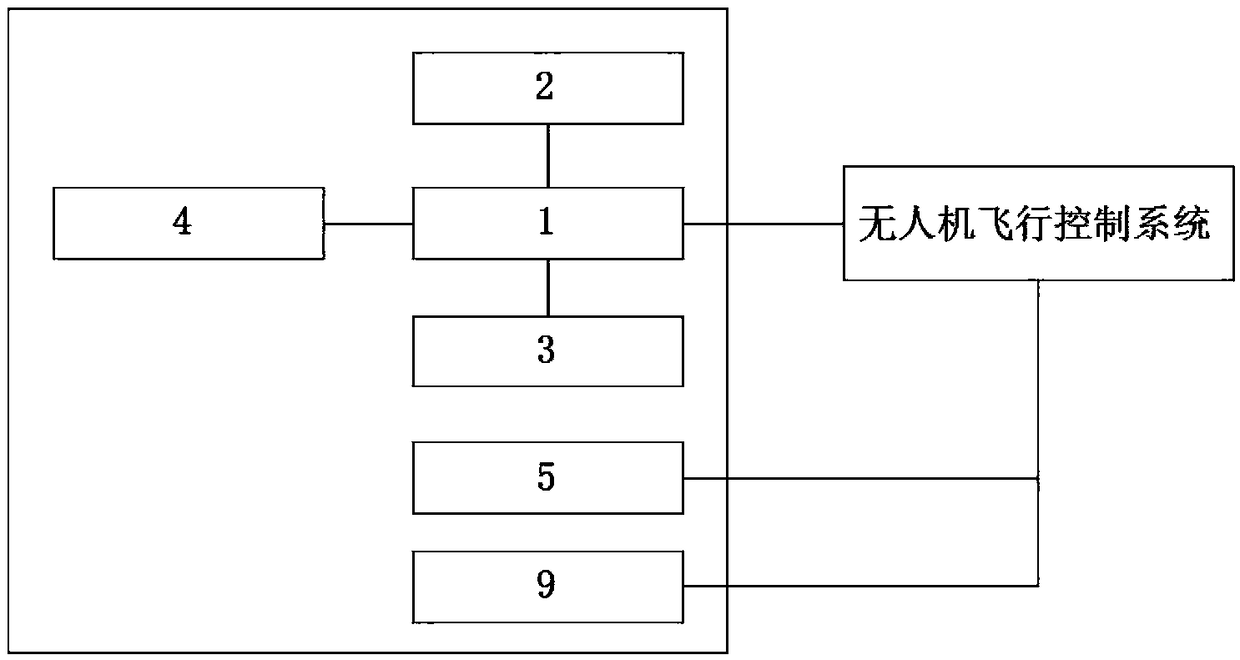
[0056] like figure 1 Shown, a kind of unmanned aerial vehicle three-dimensional path obstacle avoidance system based on probability density provided by the present invention;
[0057] The UAV three-dimensional path obstacle avoidance system includes an information processing module 1, a posture recognition module 2 connected to the information processing module 1, a posture adjustment module 3, an information collection module 4 and an obstacle avoidance execution module 5;
[0058] The information collection ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More