

A point cloud and image automatic high-precision registration method based on mutual information
A technology with mutual information and high precision, applied in the field of photogrammetry and lidar, it can solve the problems of poor robustness, unsatisfactory texture resolution and positioning accuracy, and unsuitable for irregular complex objects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
[0088] It should be understood that terms such as "having", "comprising" and "including" as used herein do not entail the presence or addition of one or more other elements or combinations thereof.
[0089] The registration based on mutual information is applied in the registration of aerial images with POS data and airborne radar, but the feasibility of the algorithm is affected by factors such as data volume and texture richness
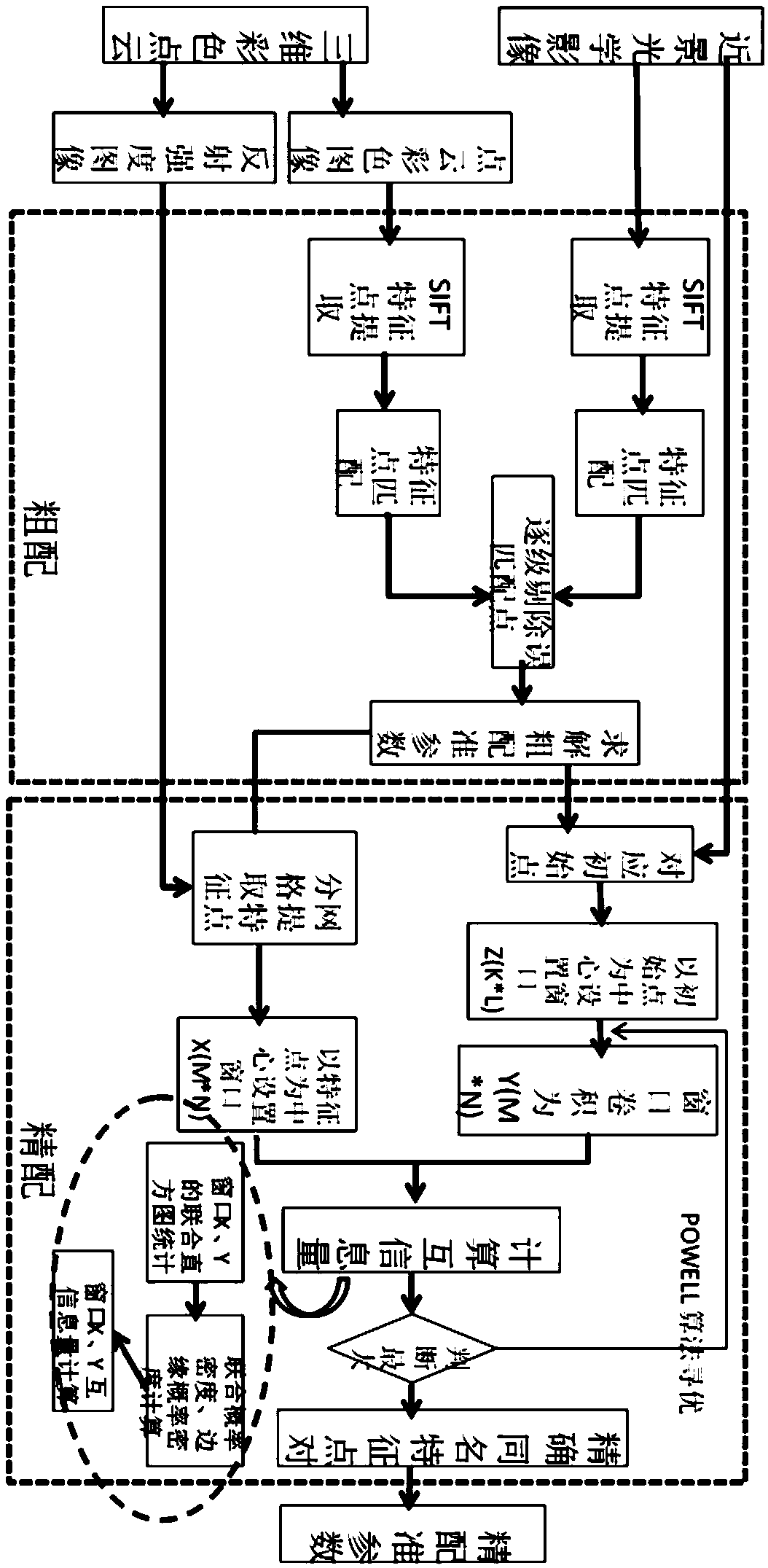
[0090] Such as figure 1 As shown, the present invention provides a method for automatic high-precision registration of point clouds and images based on mutual information, including:
[0091] Step 1, taking a close-range optical image of the object to be measured;
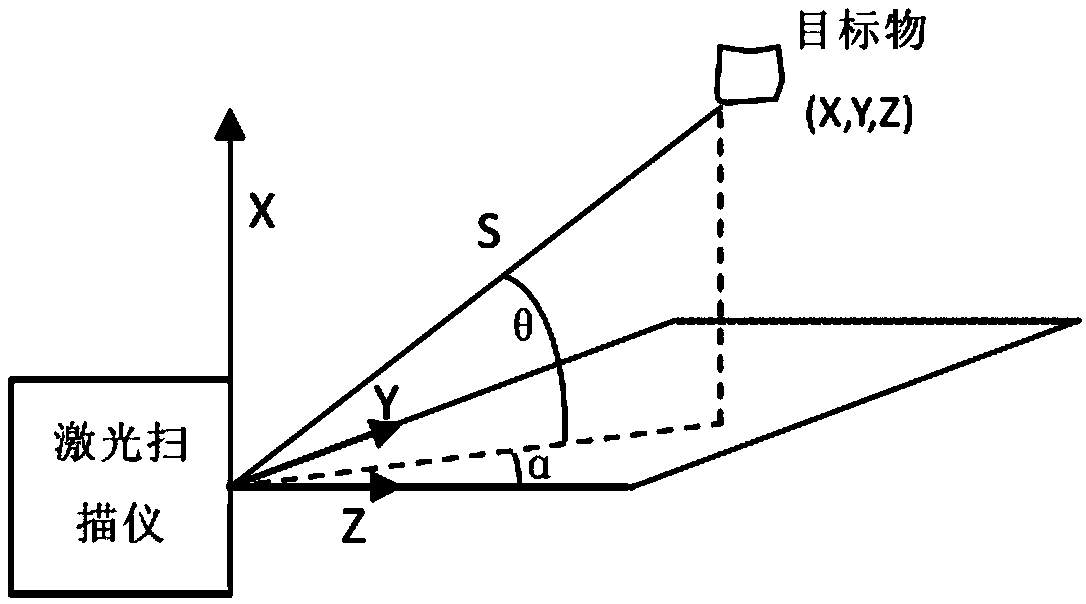
[0092] Step 2, collect the ground laser scanning point cloud of the object to be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More