

Evaluation method, device, equipment and storage medium of laser radar positioning effect
A lidar, point cloud technology, applied in radio wave measurement systems, instruments, etc., can solve the problems of high cost, long cycle, difficult data distribution control, etc., to achieve the effect of improving efficiency and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
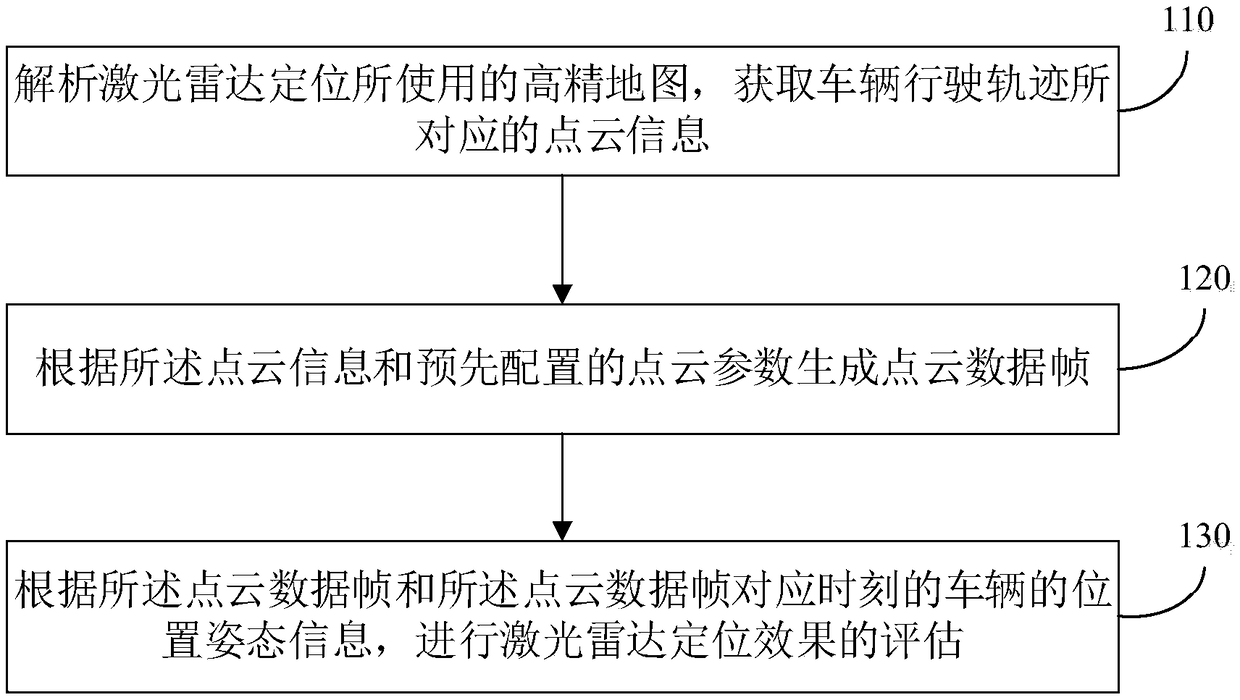
[0029] figure 1 It is a schematic flow chart of a LiDAR positioning effect evaluation method provided in Embodiment 1 of the present invention. The LiDAR positioning effect evaluation method provided in this embodiment is applicable to evaluating the LiDAR positioning effect of unmanned vehicles, especially for Evaluate the localization effect of LiDAR in various extreme environments and rare scenes for unmanned vehicles. For example, the extreme environment may be: extreme weather, including: foggy weather, rainstorm, snowstorm, windy weather, or sandy weather, etc.; the rare scene may be, for example, a scene of fallen leaves on the ground or a scene of different traffic flows. The LiDAR positioning effect evaluation method can be executed by a LiDAR positioning effect evaluation device. The device can be implemented by software and / or hardware, and is generally integrated into a terminal, such as a server. For details, see figure 1 As shown, the method includes the follow...
Embodiment 2
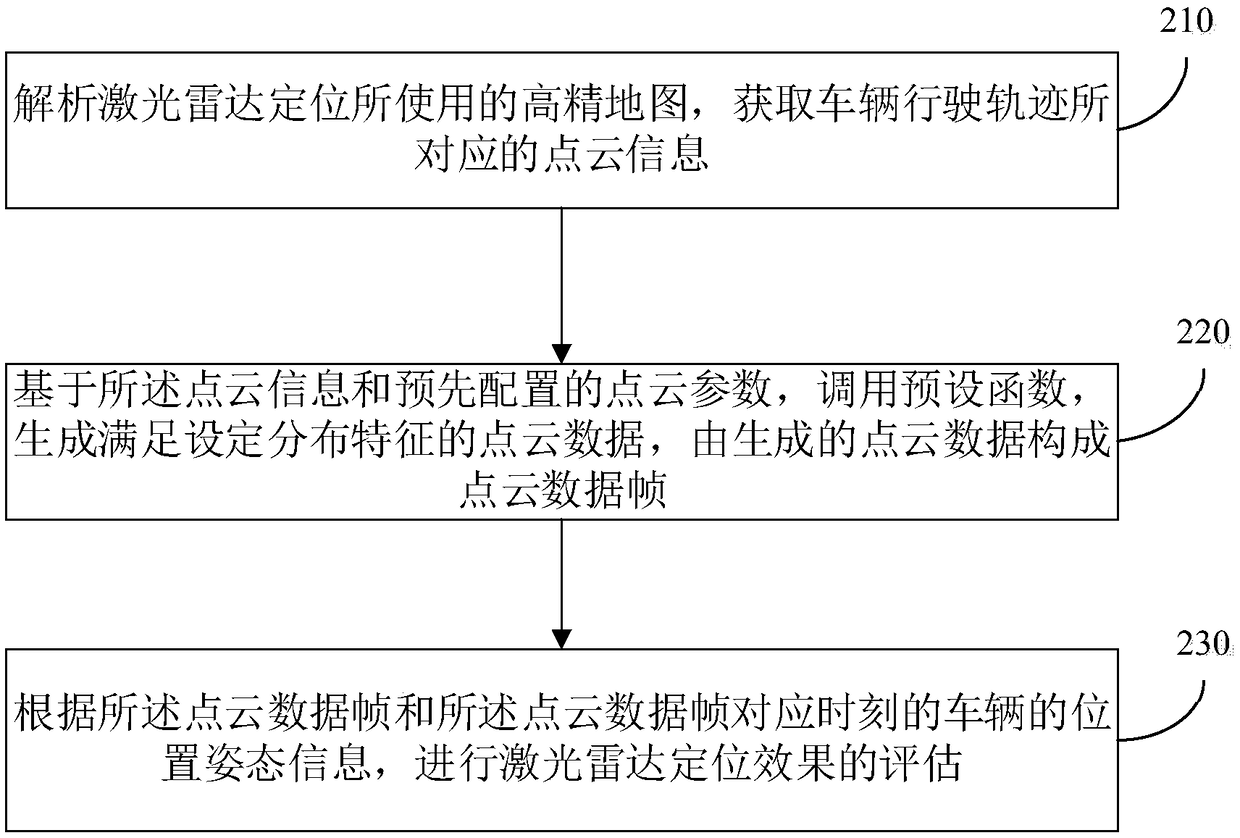
[0043] figure 2 It is a flow diagram of a laser radar positioning effect evaluation method provided by Embodiment 2 of the present invention. On the basis of the above embodiments, this embodiment specifies the point cloud information corresponding to the vehicle trajectory, and at the same time The realization process of "step 120, generating a point cloud data frame according to the point cloud information and pre-configured point cloud parameters" is described. For details, see figure 2 As shown, the method includes the following steps:
[0044] Step 210, analyzing the high-precision map used for the lidar positioning, and obtaining the point cloud information corresponding to the vehicle trajectory.
[0045] Specifically, the point cloud information may include three-dimensional coordinate values of the point cloud, point cloud intensity values, and color information. The point cloud intensity value refers to the reflection intensity information of the laser, specifi...
Embodiment 3
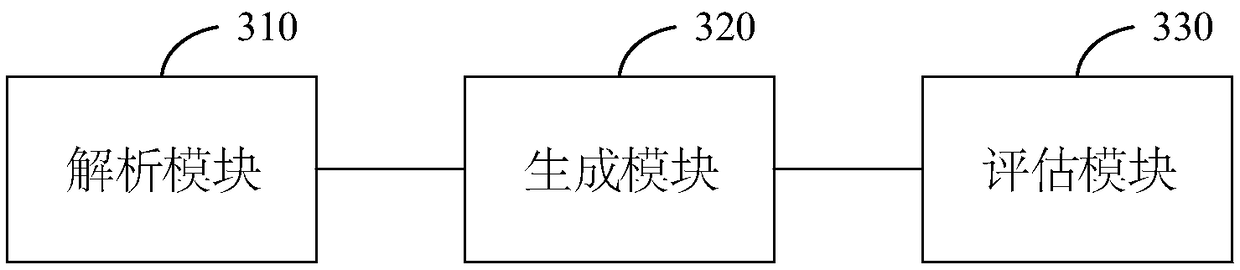
[0053] image 3 It is a schematic structural diagram of a laser point cloud positioning effect evaluation device provided in Embodiment 3 of the present invention, and the device is used to implement the laser radar positioning effect evaluation method described in the above embodiment. For details, see image 3 As shown, the device includes: an analysis module 310, a generation module 320 and an evaluation module 330;
[0054] Wherein, the parsing module 310 is used for parsing the high-precision map used for lidar positioning, and obtaining the point cloud information corresponding to the vehicle trajectory;
[0055] A generating module 320, configured to generate a point cloud data frame according to the point cloud information and preconfigured point cloud parameters;
[0056] The evaluation module 330 is configured to evaluate the laser radar positioning effect according to the point cloud data frame and the position and posture information of the vehicle at the corresp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More