North finder transposition control device and method adopting step-by-step integration PI algorithm
A control device and control method technology, applied in the field of navigation and positioning, can solve problems such as the limitation of locking angle repeatability, unfavorable new high-precision north-seeking algorithm, and difficulty in meeting the needs of high-precision north-seeking instruments, etc., to achieve high rigidity and high stability performance, shorten the transition process time, and meet the requirements of indexing control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings; the present embodiments are descriptive, not restrictive, and cannot thereby limit the protection scope of the present invention.
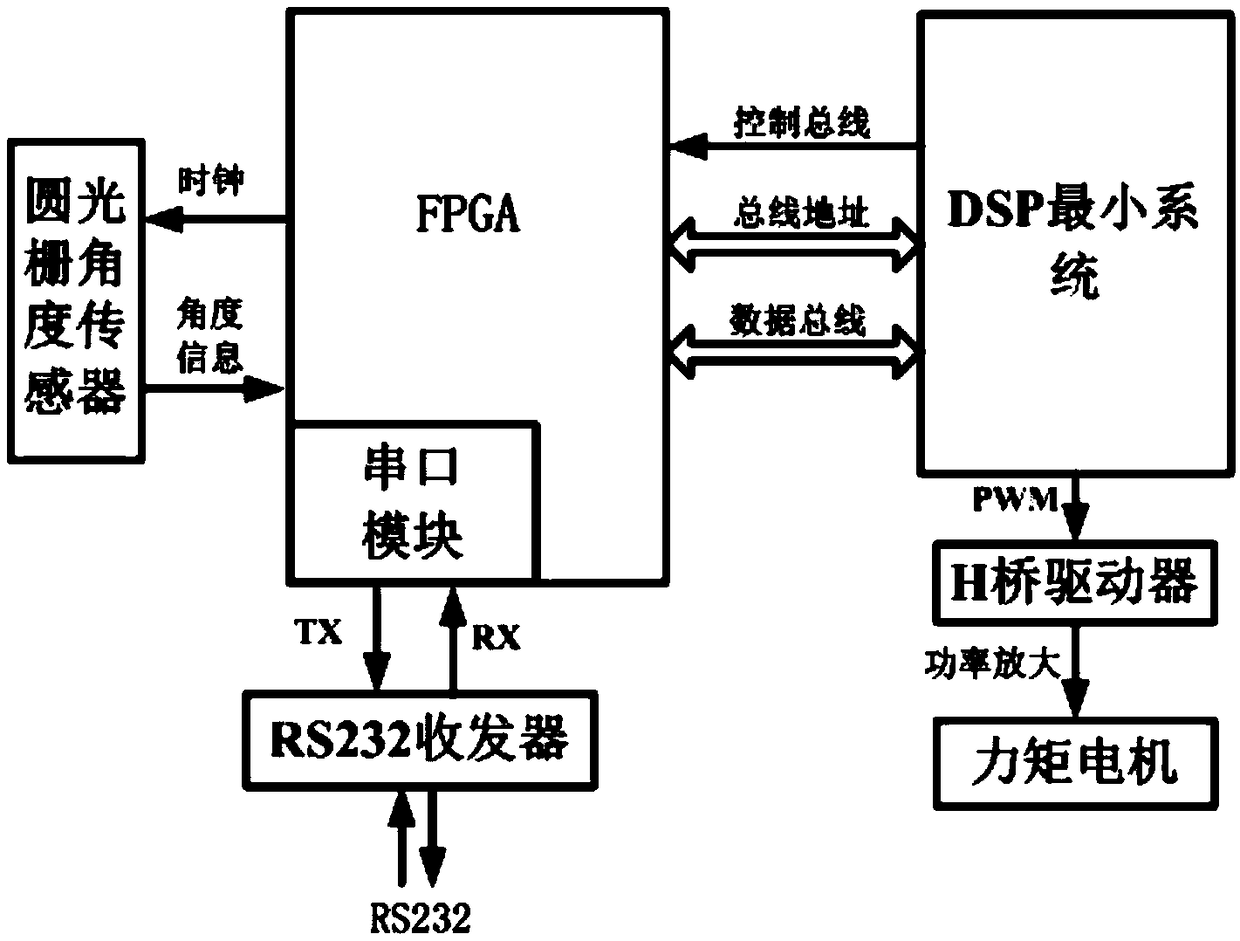
[0023] A north-finder indexing control device using the step-by-step integral PI algorithm, including the actuator torque motor, the angle measuring element circular grating angle sensor, FPGA, DSP, H-bridge driver, and RS232 transceiver. The composition relationship of each component is shown in figure 1 . The goniometric component circular grating angle sensor collects angle data information, sends the information to FPGA, FPGA transmits the data to DSP through data bus, and DSP drives torque motor through H bridge driver; at the same time, uses FPGA to write serial port control module, and through RS232 The transceiver implements external communication.
[0024] In this embodiment, the main parameters of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com