

Two-hand-tracking type multi-degree-of-freedom soft-body finger rehabilitation robot and use method thereof
A rehabilitation robot and tracking technology, applied in applications, sensors, passive exercise equipment, etc., can solve the problems of not being able to control the free movement of multiple joints of the fingers, only the whole finger can move, and reducing the effect of rehabilitation training, etc., to achieve good results Restoring finger function, ensuring safety and reliability, and saving costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the technical means, inventive features, and technical effects realized by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
[0040] In this embodiment, the metacarpal bone refers to the bone end where the palm meets the finger, the proximal phalanx refers to the bone end close to the finger, the metacarpophalangeal joint refers to the joint where the palm connects to the finger, and the second joint refers to the joint of the finger. The joint where the proximal segment joins the middle segment.
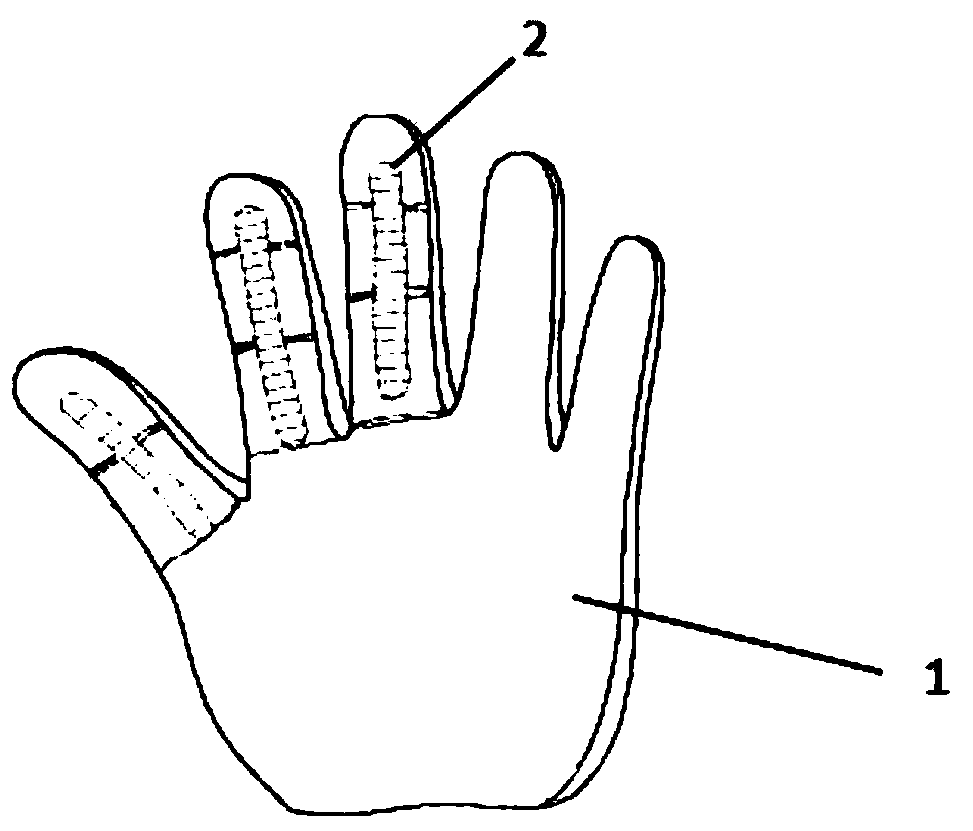
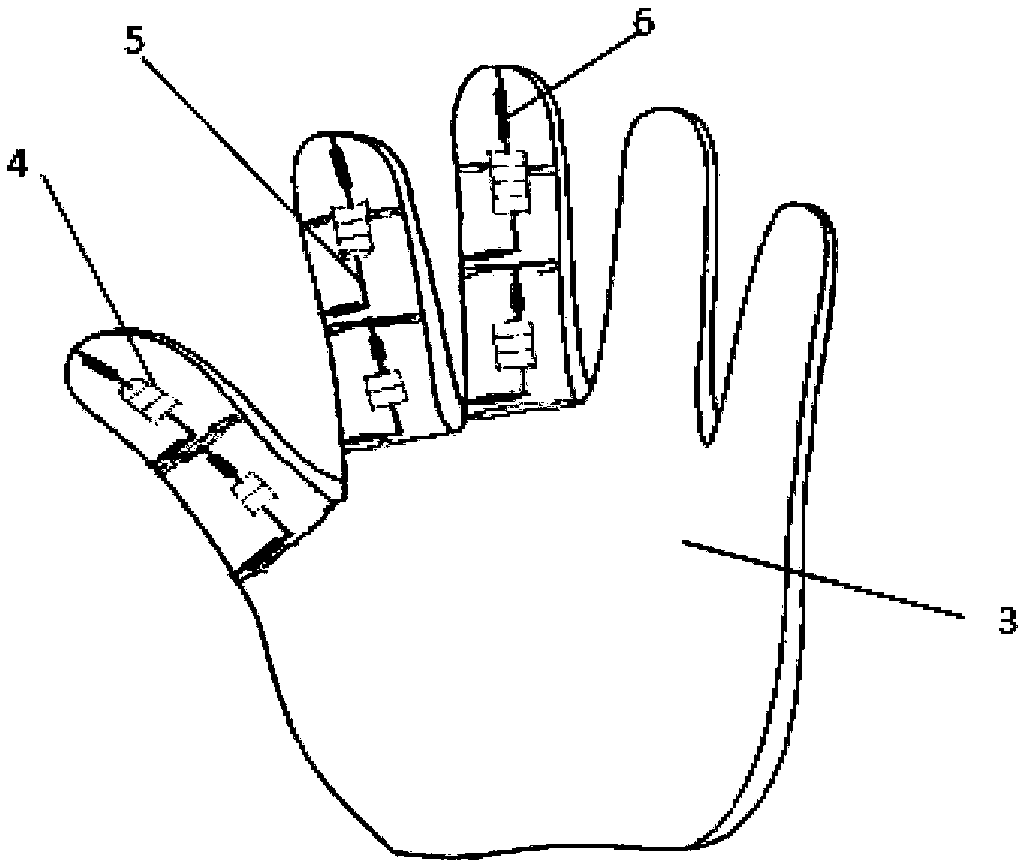
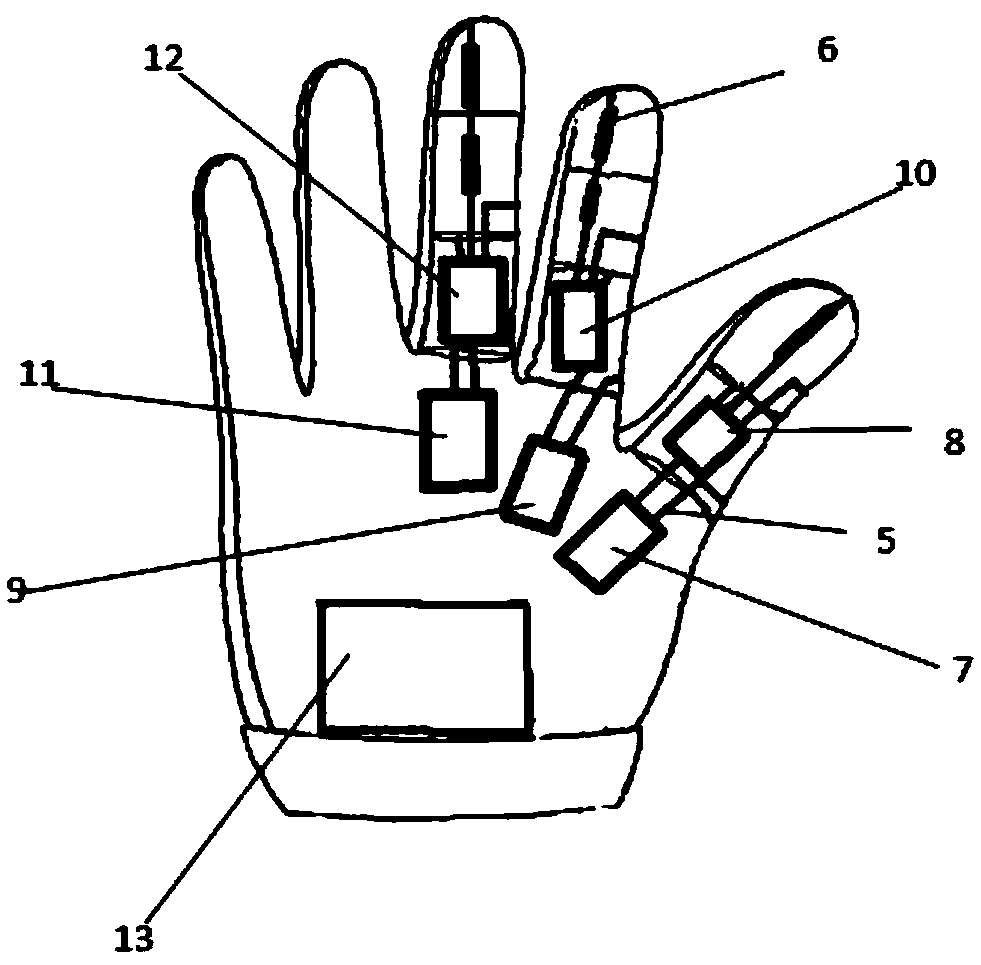
[0041] A hand-tracking multi-degree-of-freedom soft finger rehabilitation robot includes a normal hand flexible exoskeleton glove 1 , a recovery hand flexible exoskeleton glove 3 , a control system, a drive module, a motion sensing unit and multiple sets of Bowden wires 5 .
[0042] Among them, the normal hand flexible exoskeleton glove 1 is worn on the healthy hand, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More