

Robot joint friction force identification method based on LuGre friction model
A technology of robot joints and friction models, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as vibration stability, aging and impact of robot joints, and achieve the effect of improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0052] Further description will be made below in conjunction with specific embodiments.
[0053] A SCARA robot joint friction identification method based on LuGre friction model, comprising the following steps:
[0054] S1, determine the parameter value of the sinusoidal excitation curve according to the robot motion space used;
[0055] S2, use the LuGre friction model to model the friction force of the robot joints, and use the sinusoidal excitation curve to sequentially excite the robot joints to obtain the robot joint friction-velocity mapping relationship;
[0056] S3, at each stage of the friction phenomenon, identify LuGre friction model parameters according to the robot joint friction-velocity mapping relationship.
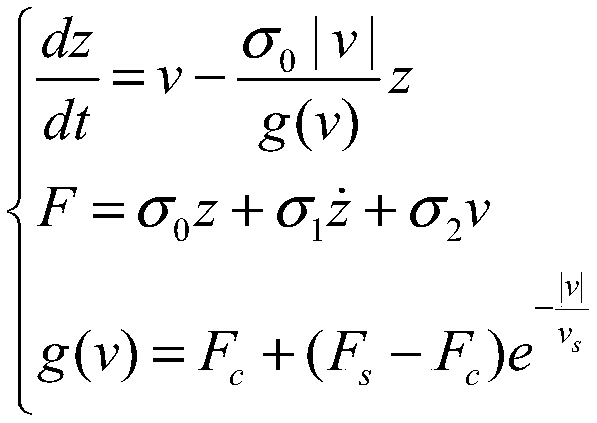
[0057] Specifically, the mathematical model of the LuGre model is shown in the following formula:
[0058]
[0059] Among them, z is the deformation of the mane, F is the joint friction force, σ 0 is the bristle stiffness, σ 1 is the bristle damping...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More