

A human body motion intention recognition control device and control method
A technology for human movement and control devices, which is used in appliances, graphic reading, and instruments that help people move around. degree, reducing the effect of training cycles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
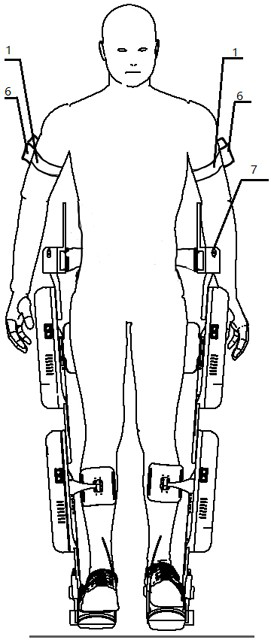
[0039] Such as figure 1 and figure 2 As shown, a human motion intention recognition control device includes:
[0040] Motion information collection module: tied to the arm of the human body to collect and send the motion information of the human body in real time;
[0041] Lower limb walker exoskeleton robot: worn on the lower body of paraplegic, hemiplegic or amputee patients, communicates with the motion information collection module, receives the data information sent by the motion information collection module, analyzes and processes it, and then controls and executes corresponding actions.
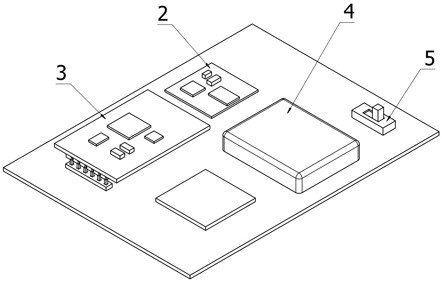
[0042] Described operation information collection module comprises elastic band 1, attitude instrument chip 2, wireless transmission chip 3, power supply module 4, switch 5 and bo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More