Unmanned aerial vehicle precise positioning landing system and method
A precise positioning and UAV technology, applied in the control/adjustment system, three-dimensional position/course control, vehicle position/route/altitude control, etc. Solve problems such as man-machine height information and difficulty in obtaining UAV position information to achieve low cost, accurate positioning, and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
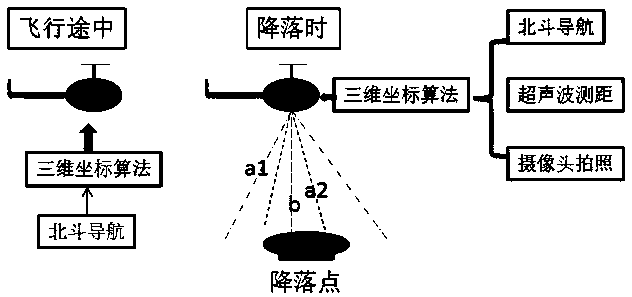
[0023] Please refer to figure 1 , the present invention provides a precise positioning and landing system for drones, including a three-dimensional coordinate algorithm module for judging the distance between the drone and the starting point and the target point; a Beidou navigation module for obtaining the starting point, the target point and the traveling process The latitude and longitude values of the points are converted into the three-dimensional coordinate values used by the cost system through an algorithm to assist in correcting the path; the ultrasonic ranging module is used to obtain the distance in the vertical direction and convert it into a value in the system coordinate system to assist in correcting the unmanned The position of the drone; the camera module, used to judge whether the drone is near the starting point or the target poin...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Frequency | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com